Vrep << Previous Next >> Onshape
Vrep << Previous Next >> Onshape
Vrep-2
試著用鍵盤的前後左右測試robot - Download
參考網址:http://www.forum.coppeliarobotics.com/viewtopic.php?t=1575&p=6085#p6065
week7測試物件
測試用Vrep呼叫方向鍵的指令
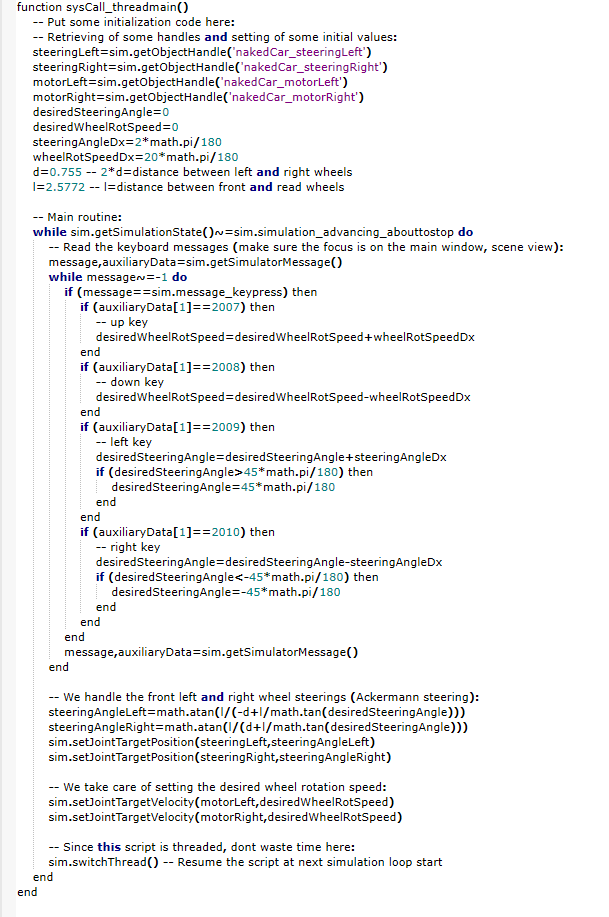
(內建程式推不上去改用截圖放)
------------------------------------------------------------------------------------------------------------
測試方向鍵於手足球的人偶自由度&code設定 :
RJ1 : 為人偶前後踢球的軸代稱 \ RJ2 : 為控制人偶左右的桿子的軸代稱
樹狀圖為gif中所表示
下方為Lua code --->用於Vrep3.6.1版本中
function sysCall_init()
right_left_handle= sim.getObjectHandle('RJ1')
up_down_handle= sim.getObjectHandle('RJ2')
MaxVel=5
right_left_velocity=0
up_down_velocity=0
dVel=0.5;
sim.setJointTargetVelocity(right_left_handle,right_left_velocity)
sim.setJointTargetVelocity(up_down_handle,up_down_velocity)
end
function sysCall_actuation()
message,auxiliaryData=sim.getSimulatorMessage()
while message~=-1 do
if (message==sim.message_keypress) then
if (auxiliaryData[1]==32) then
-- right key
right_left_velocity=0
up_down_velocity=0
sim.setJointForce(right_left_handle, 0)
sim.setJointForce(up_down_handle, 0)
break
else
sim.setJointForce(right_left_handle, 10000)
sim.setJointForce(up_down_handle, 10000)
end
if (auxiliaryData[1]==2007) then
-- left key
right_left_velocity=right_left_velocity+dVel*1.3
end
if (auxiliaryData[1]==2008) then
-- right key
right_left_velocity=right_left_velocity-dVel*1.3
end
if (auxiliaryData[1]==2009) then
-- up key
up_down_velocity=up_down_velocity+dVel/10
end
if (auxiliaryData[1]==2010) then
-- down key
up_down_velocity=up_down_velocity-dVel/10
end
end
message,auxiliaryData=sim.getSimulatorMessage()
end
if right_left_velocity>MaxVel then
right_left_velocity=-5
end
if right_left_velocity<-MaxVel then
right_left_velocity=5
end
if up_down_velocity>MaxVel then
up_down_velocity=0
end
if up_down_velocity<-MaxVel then
up_down_velocity=0
end
sim.setJointTargetVelocity(right_left_handle,right_left_velocity)
sim.setJointTargetVelocity(up_down_handle,up_down_velocity)
end
測試版本目前還未設定雙判定來改變控制的桿件(希望能行)&還有電腦的回擊也還沒寫入。
keyboard code 設定 {Unicode} :
http://www.runoob.com/try/try.php?filename=tryjsref_event_key_keycode
week8測試物件
嘗試將兩軸分開控制,由於我們是利用加速度來驗算所以在編寫code方面較為複雜,目標為利用鍵盤按鍵分別控制各軸,達成一次控制一軸且可切換之目標。
Vrep << Previous Next >> Onshape