第十一周 << Previous Next >> 第十三周
第十一周 << Previous Next >> 第十三周
第十二周
開會紀錄
----暫時放著----
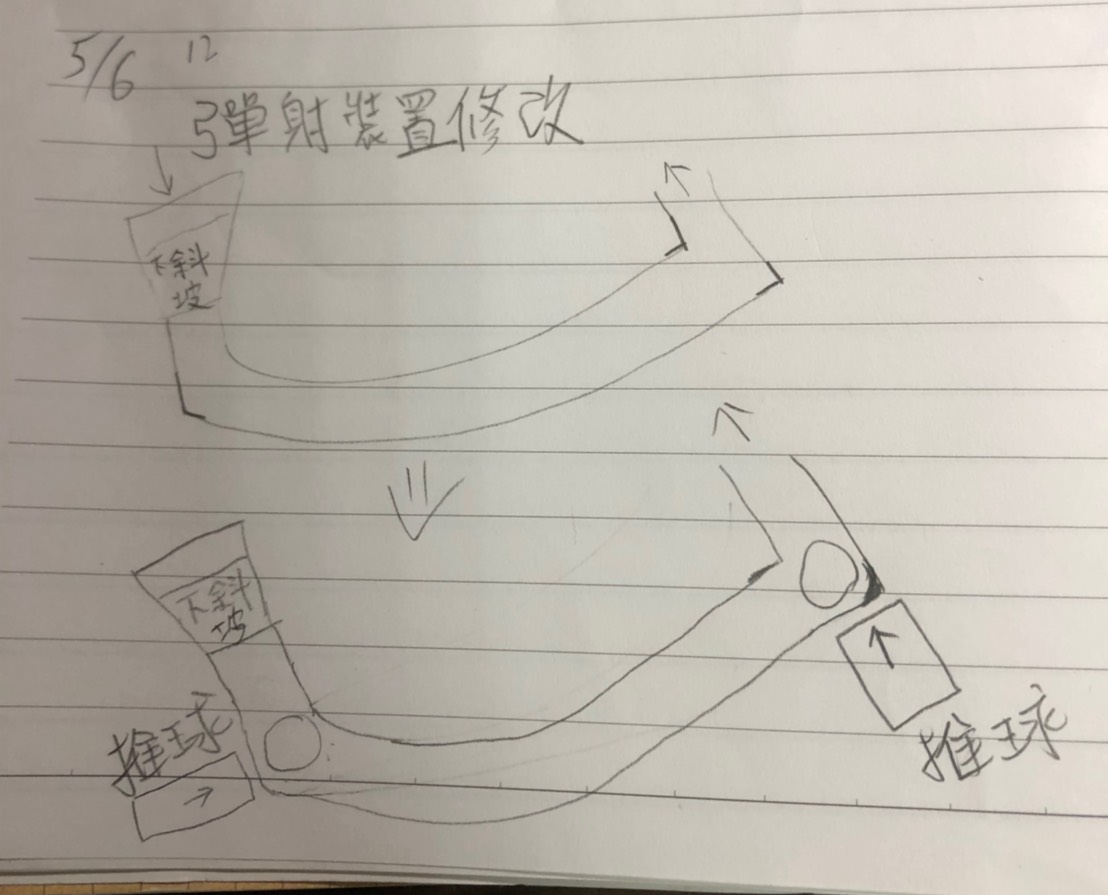
改寫code=python to lua並簡化
優點:
python : 可執行運算值較大的編譯
lua : Vrep內部沿用 , 延遲現象較少
缺點:
python : 會有爆ping問題導致延遲
lua : 太多運算時直接停止
function sysCall_init()
KickBallV = 10
R_KickBallVel = (math.pi/180)*KickBallV
B_KickBallVel = -(math.pi/180)*KickBallV
Sphere_handle=sim.getObjectHandle('Sphere')
BRod_handle=sim.getObjectHandle('BRod')
BRev_handle=sim.getObjectHandle('BRev')
BMo_handle=sim.getObjectHandle('BMo')
--
RRod_handle=sim.getObjectHandle('RRod')
RRev_handle=sim.getObjectHandle('RRev')
RMo_handle=sim.getObjectHandle('RMo')
end
function sysCall_actuation()
position_BR=sim.getObjectPosition(BRod_handle,-1)
position_S=sim.getObjectPosition(Sphere_handle,-1)
X =position_S[1] - position_BR[1]
Y =position_S[2] - position_BR[2]
if 1 then
if X <= 0.02 and Y <= 0 then
sim.setJointTargetVelocity(BRev_handle,B_KickBallVel)
sim.setJointTargetVelocity(BRev_handle,-1)
elseif X > 0.02 and Y <= 0 then
sim.setJointTargetVelocity(BRev_handle,B_KickBallVel)
sim.setJointTargetVelocity(BRev_handle,1)
elseif X <= 0.02 and Y > 0 then
sim.setJointTargetVelocity(BRev_handle,R_KickBallVel)
sim.setJointTargetVelocity(BRev_handle,-1)
elseif X > 0.02 and Y > 0 then
sim.setJointTargetVelocity(BRev_handle,R_KickBallVel)
sim.setJointTargetVelocity(BRev_handle,1)
end
YYYYY = Y*5
sim.setJointTargetVelocity(BMo_handle,YYYYY)
end
---
position_RR=sim.getObjectPosition(RRod_handle,-1)
X =position_S[1] - position_RR[1]
Y =position_S[2] - position_RR[2]
if 1 then
if X <= 0.02 and Y <= 0 then
sim.setJointTargetVelocity(RRev_handle,B_KickBallVel)
sim.setJointTargetVelocity(RRev_handle,-1)
elseif X > 0.02 and Y <= 0 then
sim.setJointTargetVelocity(RRev_handle,B_KickBallVel)
sim.setJointTargetVelocity(RRev_handle,1)
elseif X <= 0.02 and Y > 0 then
sim.setJointTargetVelocity(RRev_handle,R_KickBallVel)
sim.setJointTargetVelocity(RRev_handle,-1)
elseif X > 0.02 and Y > 0 then
sim.setJointTargetVelocity(RRev_handle,R_KickBallVel)
sim.setJointTargetVelocity(RRev_handle,1)
end
YYYYY = Y*5
sim.setJointTargetVelocity(RMo_handle,YYYYY)
end
end
--by 40623130--
原本要編寫切換鍵但於vrep中用io.clock等時間等待輸入雙命令時會出現運算值過大導致停止問題 , 所以先寫電腦打擊與跟蹤球
原python code出處(by 40623128):https://mdekmol.github.io/cd2019a-task1-2019cda_t1_g3_1/content/%E6%89%8B%E8%B6%B3%E7%90%83%E6%89%8B%E6%8E%A7%E8%88%87%E9%9B%BB%E8%85%A6%E5%B0%8D%E6%89%93.html
第十一周 << Previous Next >> 第十三周