V-rep 動態模擬 << Previous Next >> 系統功能展示
V-rep 動態模擬 << Previous Next >> 系統功能展示
送球機構設計與模擬
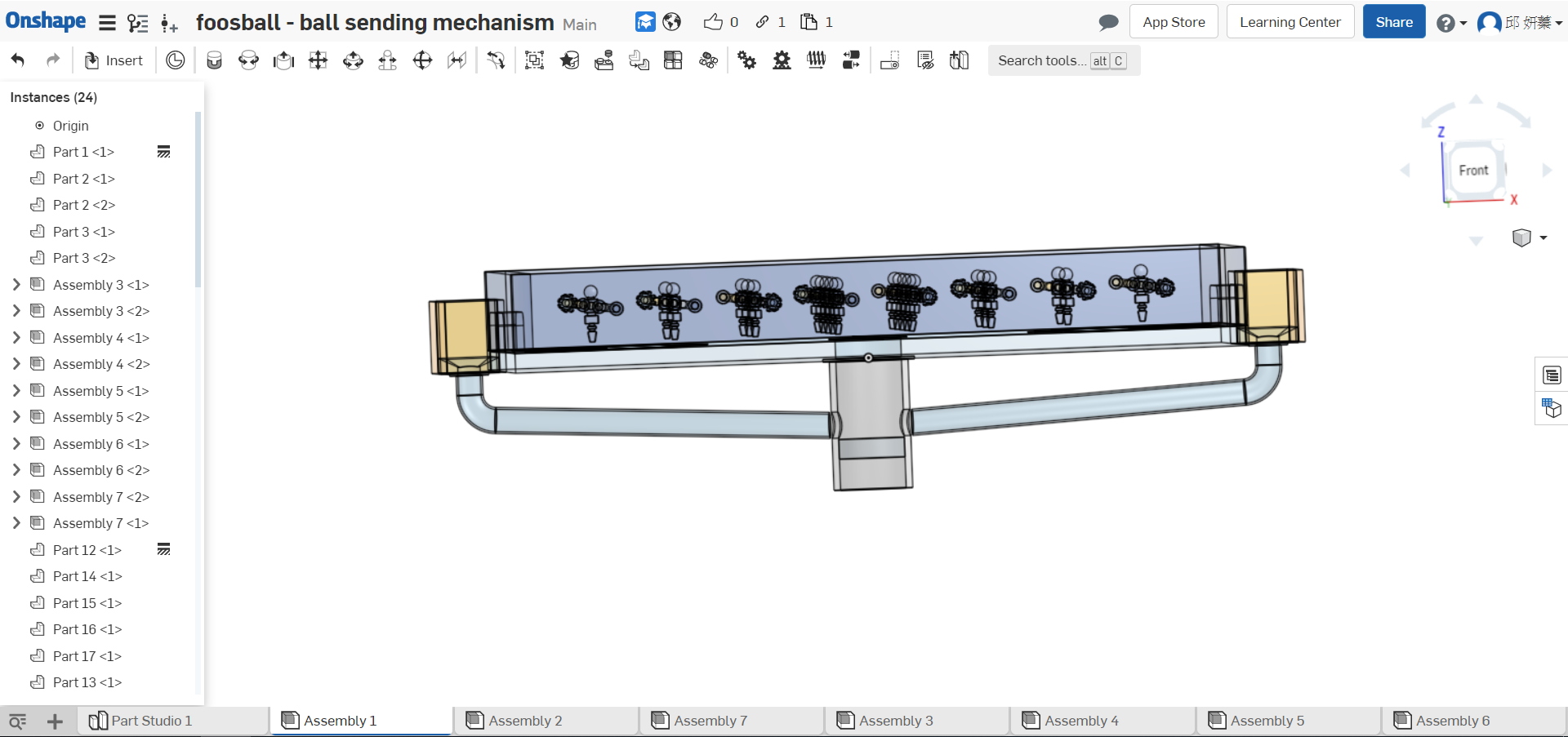
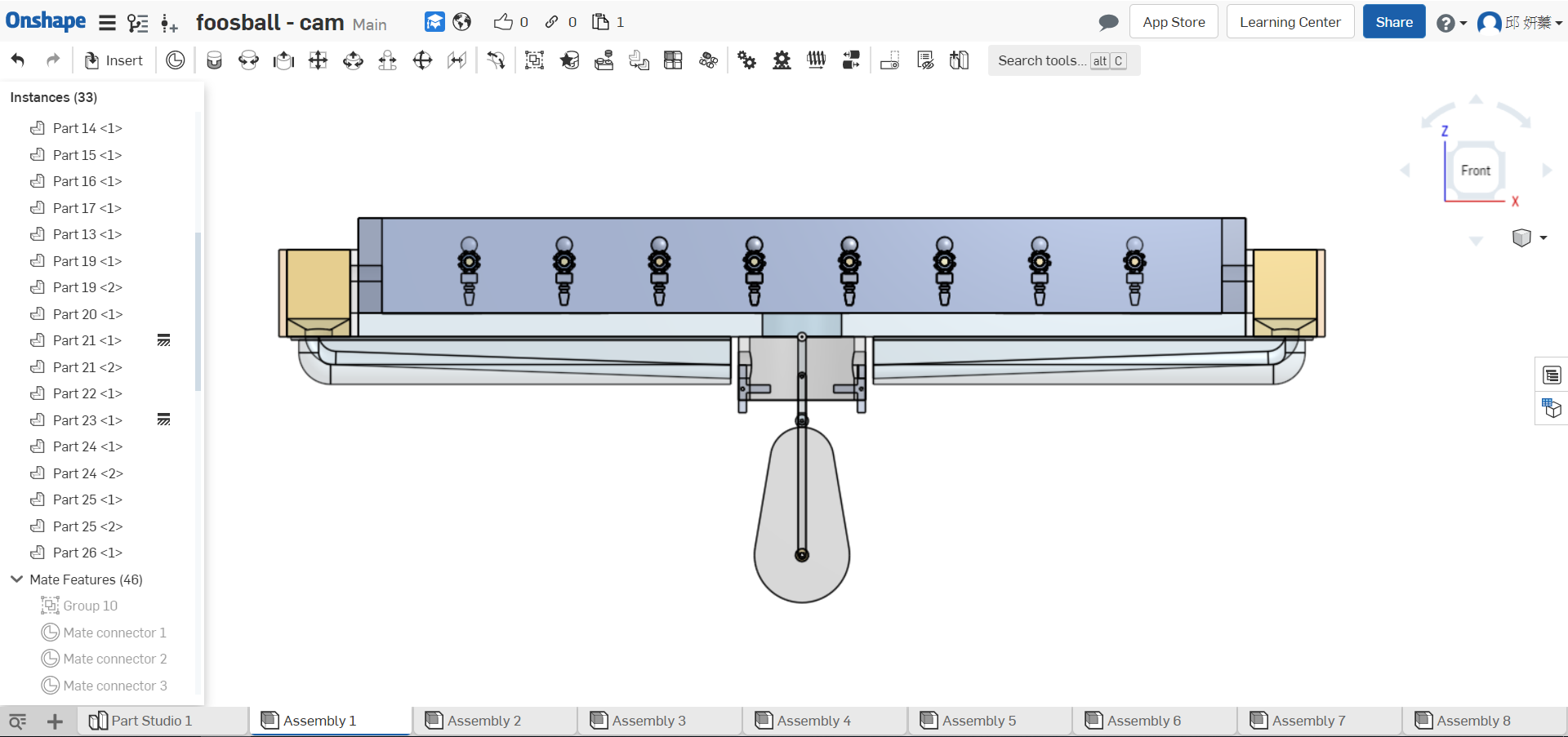
送球機構設計說明
機構模擬測試
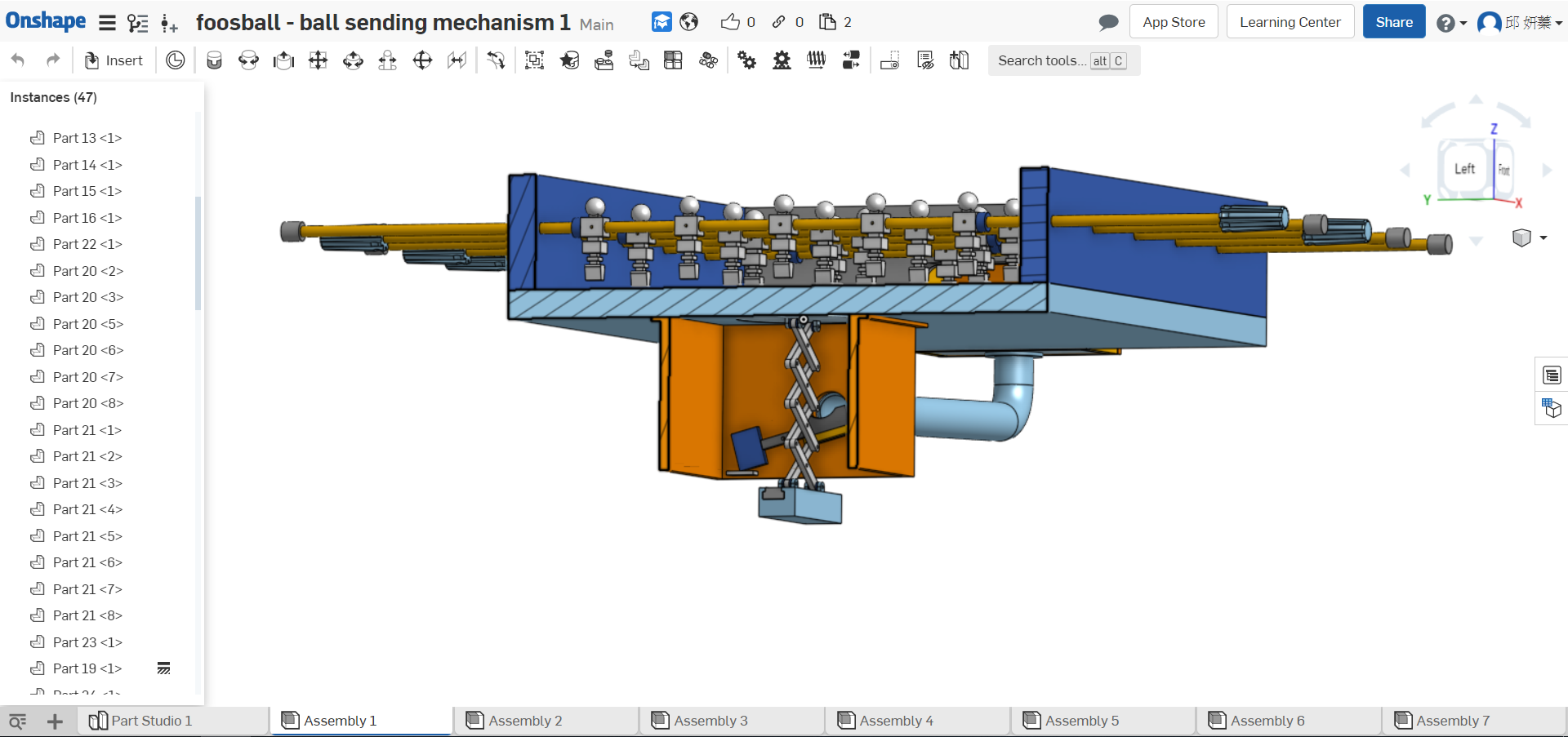
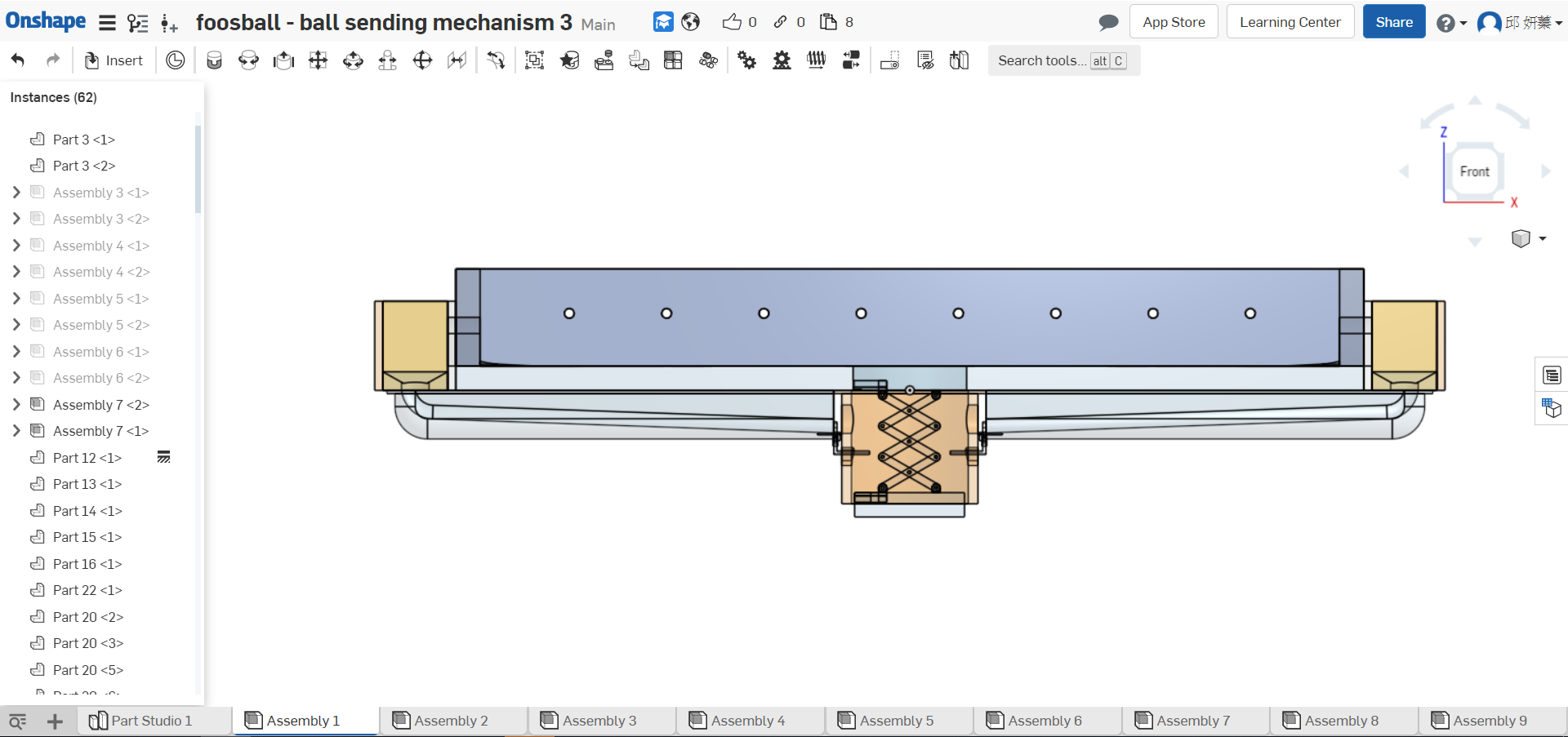
送球機構第一版模擬
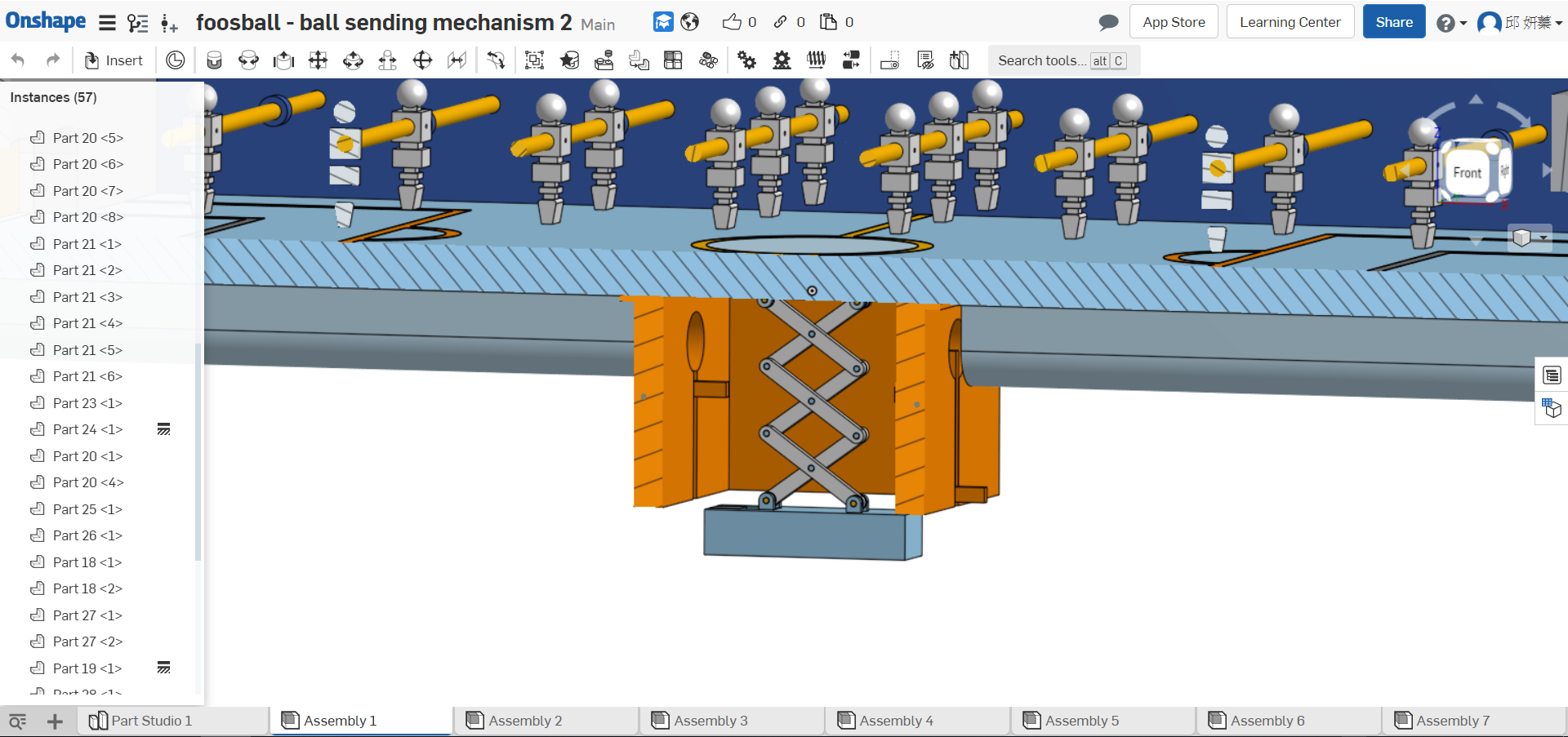
送球機構左右進洞
送球機構程式
利用感測器感測到球,使平台下降到下方的感測器,球滾入後,平台上升,回到場內,繼續競賽
function sysCall_init()
-- 定義參數
slider=sim.getObjectHandle('drive')
-- 定義物件 drive 驅動軸為 slider
down_Sensor=sim.getObjectHandle("sensor")
-- 定義物件 sensor 感測器為 down_Sensor
down_Sensor_1=sim.getObjectHandle("sensor1")
-- 定義物件 sensor1 感測器為 down_Sensor_1
up_Sensor=sim.getObjectHandle("sensor0")
-- 定義物件 sensor0 感測器為 up_Sensor
speed=0
-- 初始速度參數
A=-1
-- 初始值
b=-1
-- 初始值
end
function sysCall_actuation()
down=sim.readProximitySensor(down_Sensor)
-- down 讀取 down_Sensor 感測器的狀態
down_1=sim.readProximitySensor(down_Sensor_1)
-- down_1 讀取 down_Sensor_1 感測器的狀態
up=sim.readProximitySensor(up_Sensor)
-- up 讀取 up_Sensor 感測器的狀態
if (down>0) or (down_1>0)
-- 當感測器 down 或 down_1 觸發
then A=sim.getSimulationTime()+3
-- 設定 A = 模擬時間 + 3 秒
end
if (A>0)
then sim.setJointTargetVelocity(slider,speed-0.08)
-- slider 就會以速度 -0.08 向下移動
end
if (up>0)
-- 當感測器 up 觸發
then b=sim.getSimulationTime()+3
-- 設定 b = 模擬時間 + 3 秒
end
if (b>0)
then sim.setJointTargetVelocity(slider,speed+0.01)
-- slider 就會以速度 0.01 向上移動
end
endV-rep 動態模擬 << Previous Next >> 系統功能展示