git << Previous Next >> Onshape
V-rep
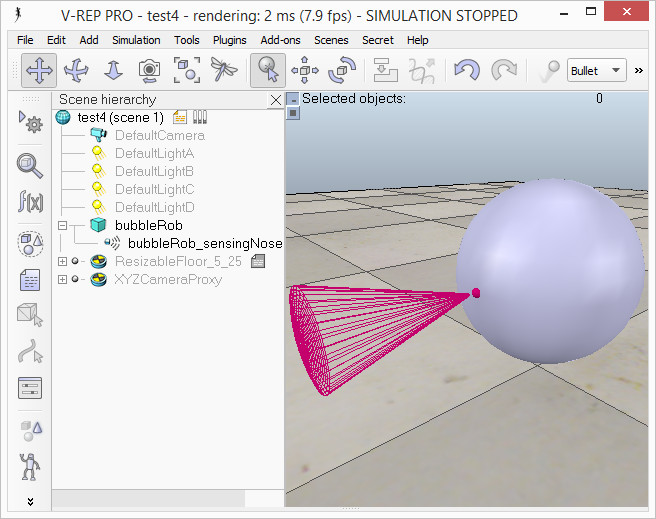
Proximity sensor
添加接近傳感器 proximity sensor
Menu bar --> Add --> Proximity sensor --> Cone type
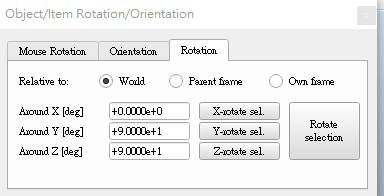
在 orientation dialog 對話框中
沿y軸和z軸旋轉90度 點擊Rotation Selection
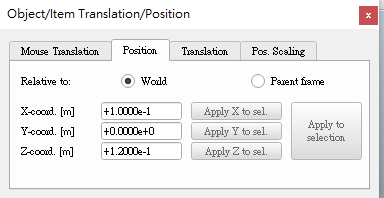
在 position dialog 對話框中
x方向設置0.1 z方向設置0.12
修改距離傳感器的參數Show volume parameter
Offset 0.005, Angle 30 Range 0.15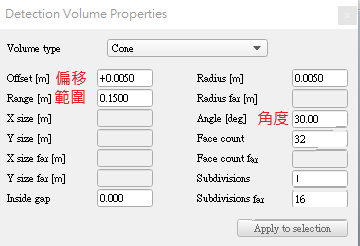
Show detection parameter中將Don’t allow detection ifdistance smaller than取消
最後將傳感器連接到機器人的身體
![]()
Vision sensor
添加視覺傳感器 vision sensor
Menu bar-->Add-->Vision sensor-->Perspective type
將視覺傳感器和距離傳感器放置一起且方向一致
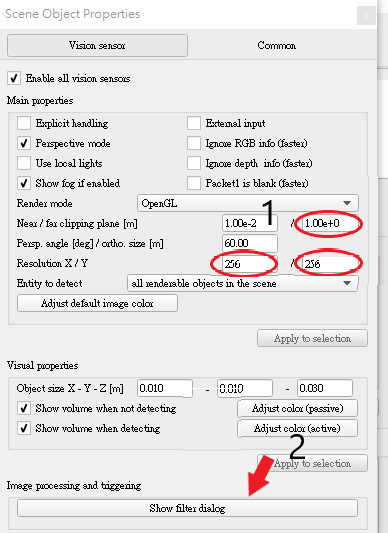
1. 在視覺傳感器的屬性欄中配置Far clipping plane 爲1
Resolution x 和y 設爲256和256
2. 點擊show filter dialog
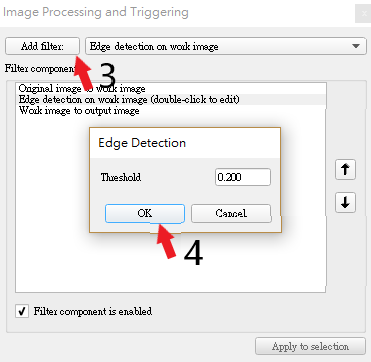
3. 選擇Edget detection on work image
然後點擊Add filter
4. 閾值設置爲0.2 點選OK
Floating view上右鍵 View-->Associate simulation with selected vision sensor
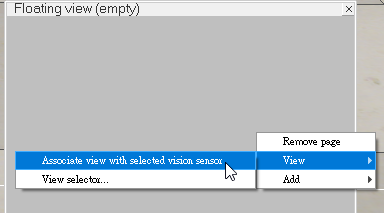
就可以看到視覺感測器的畫面
bubbleRob腳本
選擇對象BubbleRob--->右鍵選擇Add-->Associate child script-->Non threaded
腳本文件語言爲lua語言
function speedChange_callback(ui,id,newVal)
speed=minMaxSpeed[1]+(minMaxSpeed[2]-minMaxSpeed[1])*newVal/100
end
function sysCall_init()
-- This is executed exactly once, the first time this script is executed
bubbleRobBase=sim.getObjectAssociatedWithScript(sim.handle_self) -- this is bubbleRob's handle
leftMotor=sim.getObjectHandle("bubbleRob_leftMotor") -- Handle of the left motor
rightMotor=sim.getObjectHandle("bubbleRob_rightMotor") -- Handle of the right motor
noseSensor=sim.getObjectHandle("bubbleRob_sensingNose") -- Handle of the proximity sensor
minMaxSpeed={50*math.pi/180,300*math.pi/180} -- Min and max speeds for each motor
backUntilTime=-1 -- Tells whether bubbleRob is in forward or backward mode
-- Create the custom UI:
xml = '<ui title="'..sim.getObjectName(bubbleRobBase)..' speed" closeable="false" resizeable="false" activate="false">'..[[
<hslider minimum="0" maximum="100" onchange="speedChange_callback" id="1"/>
<label text="" style="* {margin-left: 300px;}"/>
</ui>
]]
ui=simUI.create(xml)
speed=(minMaxSpeed[1]+minMaxSpeed[2])*0.5
simUI.setSliderValue(ui,1,100*(speed-minMaxSpeed[1])/(minMaxSpeed[2]-minMaxSpeed[1]))
end
function sysCall_actuation()
result=sim.readProximitySensor(noseSensor) -- Read the proximity sensor
-- If we detected something, we set the backward mode:
if (result>0) then backUntilTime=sim.getSimulationTime()+4 end
if (backUntilTime<sim.getSimulationTime()) then
-- When in forward mode, we simply move forward at the desired speed
sim.setJointTargetVelocity(leftMotor,speed)
sim.setJointTargetVelocity(rightMotor,speed)
else
-- When in backward mode, we simply backup in a curve at reduced speed
sim.setJointTargetVelocity(leftMotor,-speed/2)
sim.setJointTargetVelocity(rightMotor,-speed/8)
end
end
function sysCall_cleanup()
simUI.destroy(ui)
end
bubbleRob
成品圖
git << Previous Next >> Onshape