40623225-Week
Week4:
如何建立可攜系統:
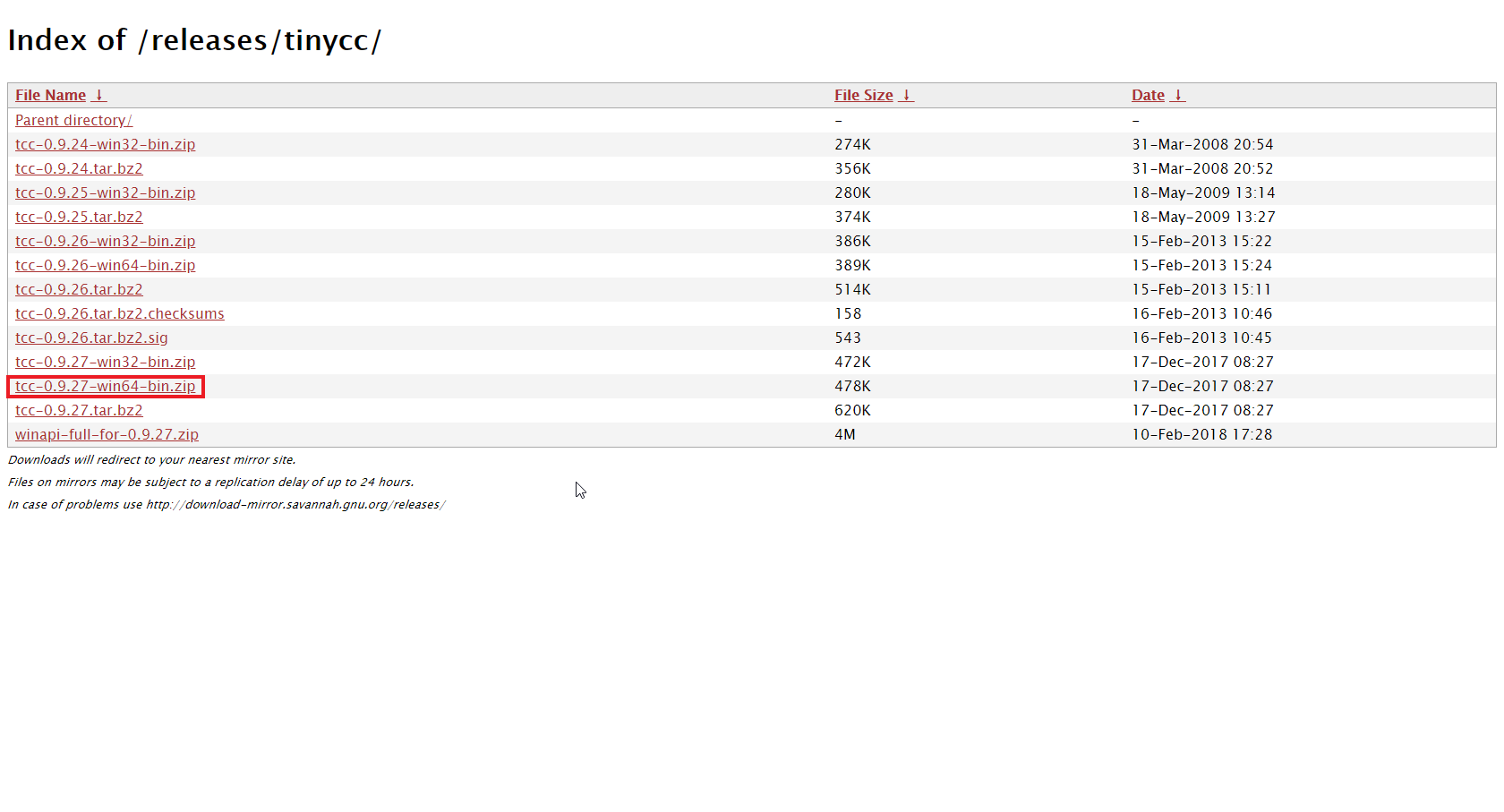
1.先將Python、Scite、HxD、Kdiff3和TinyC都下載好,之後對這些檔案進行解壓縮。


1.1對python進行解壓縮
第1個和第4個不勾選
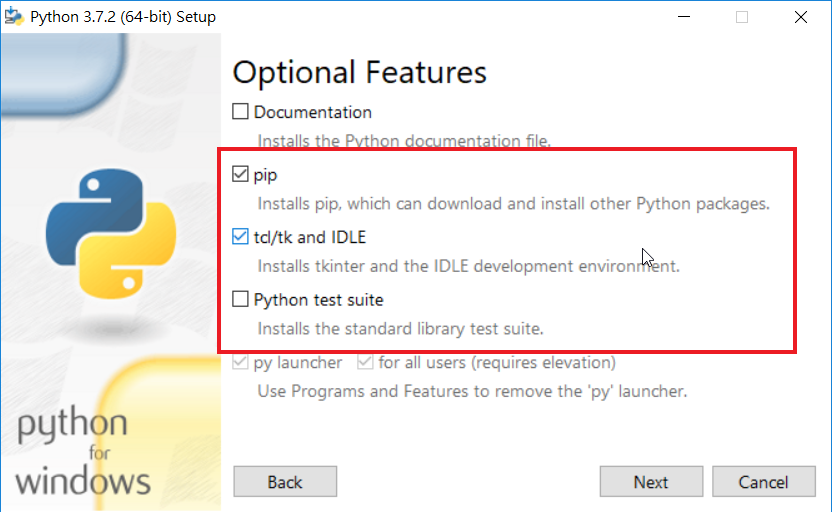
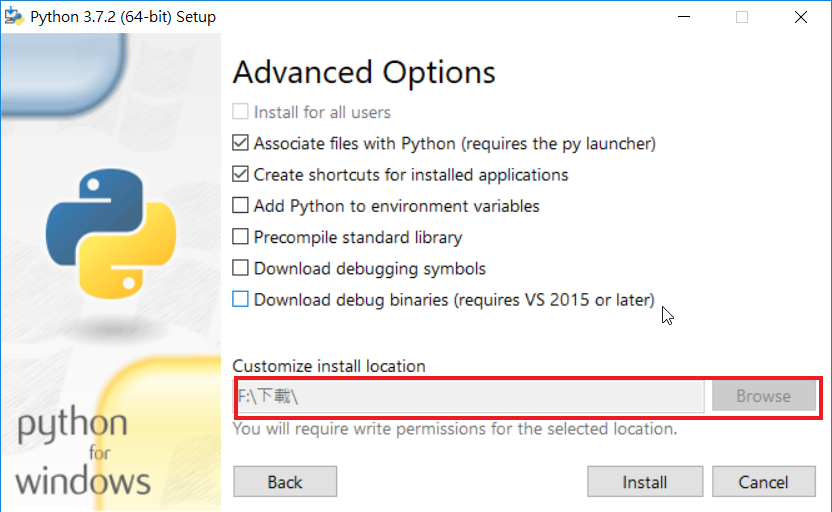
可以選擇要安裝的位置
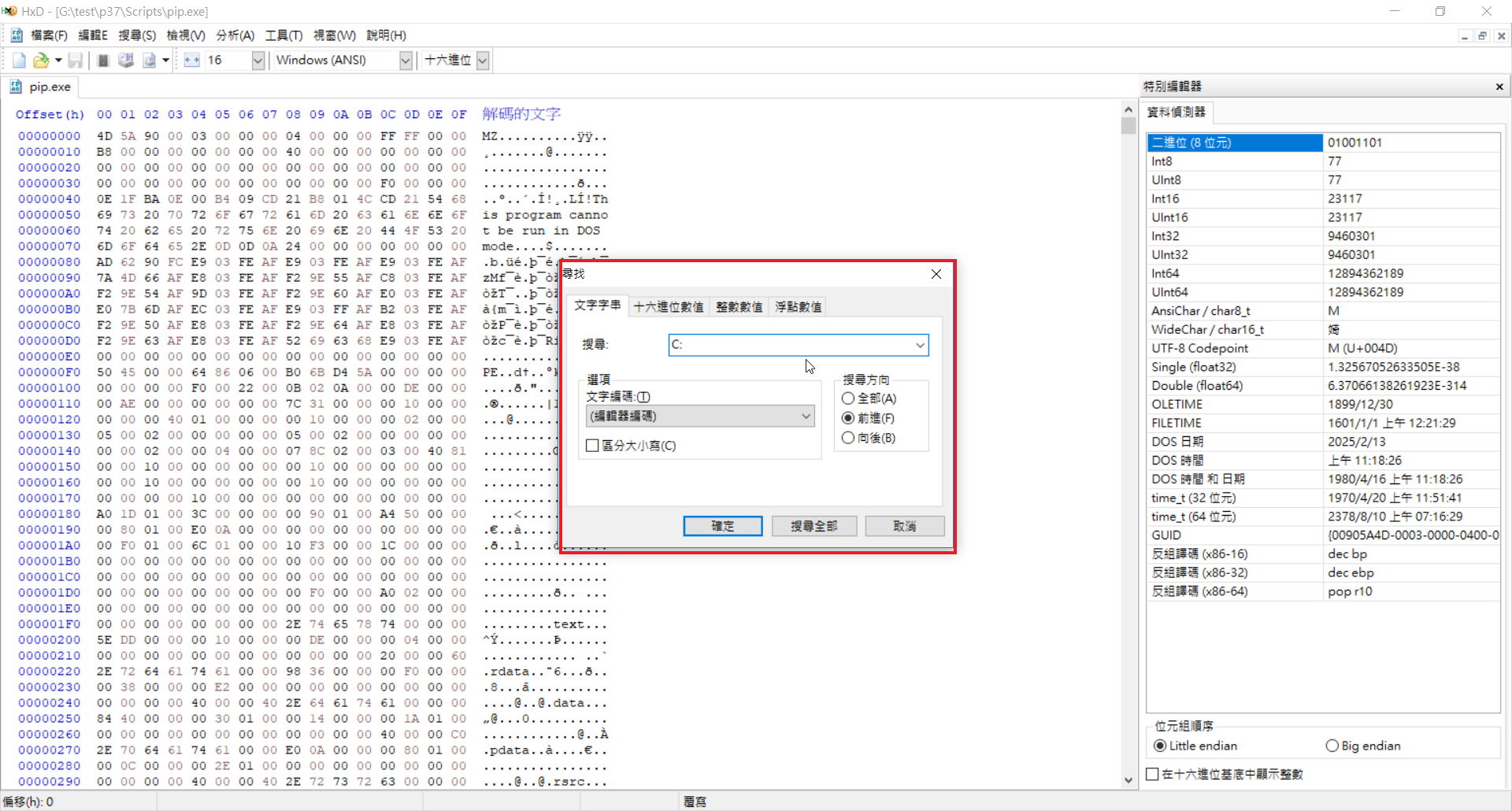
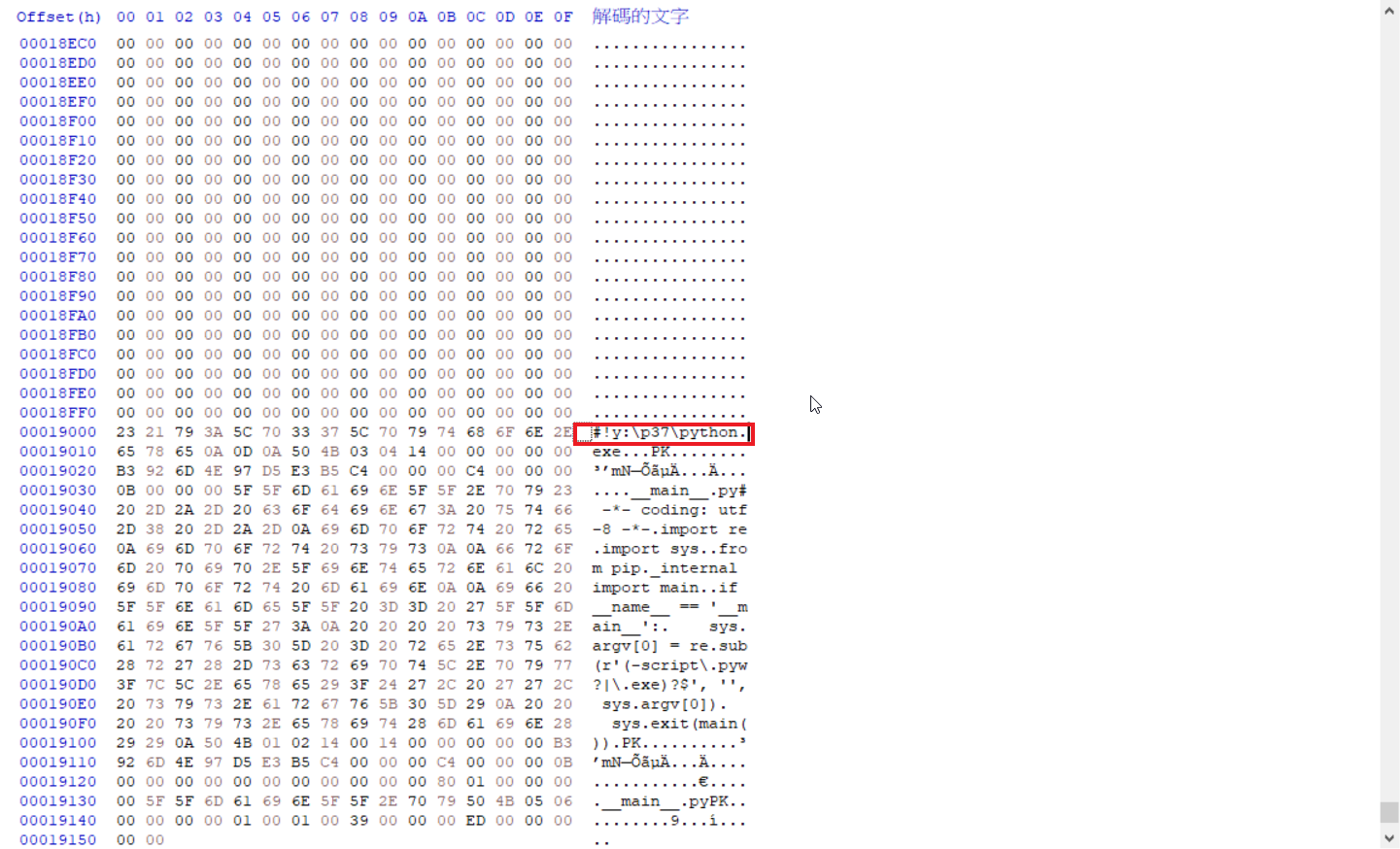
2.打開HxD,對P37->Scripts裡的pip檔做更改,先用搜尋找C:,之後修改成y:\p37\python
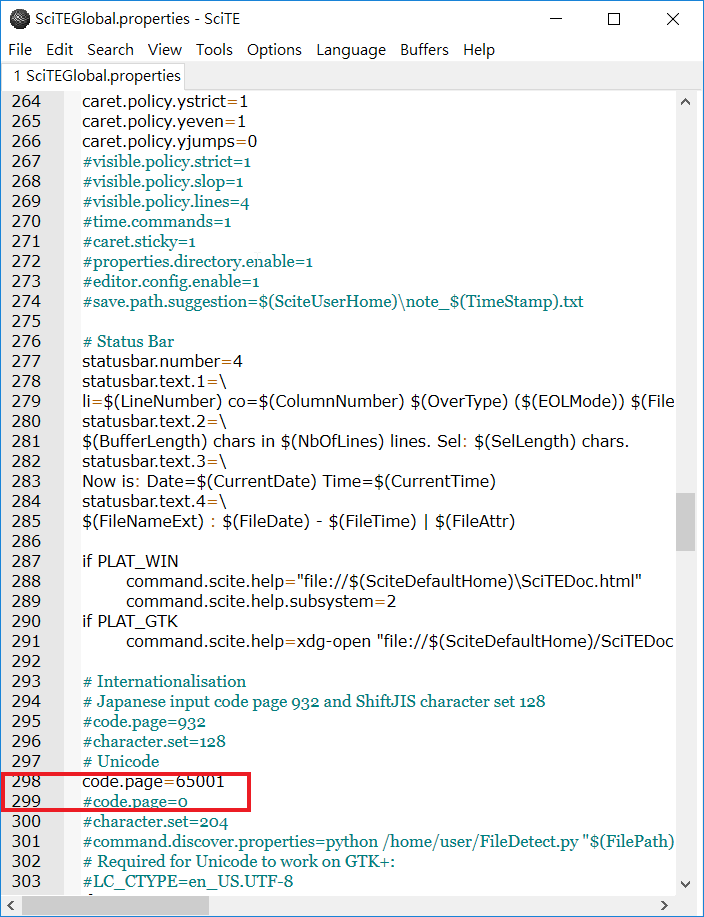
3.打開Scite,打開Options->Open Global Options File和View->Line Numbers,之後搜尋code,修改298行和299行
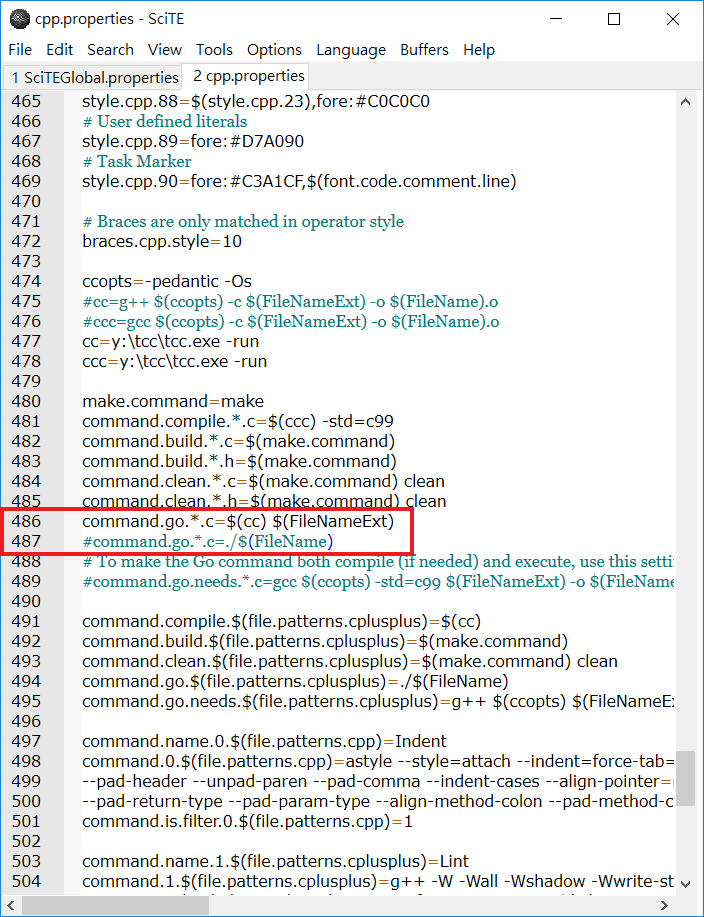
4.在資料夾中搜尋cpp,用scite對cpp進行修改,修改475行和476行,並新增cc=y:\tcc\tcc.exe -run 和ccc=y:\tcc\tcc.exe -run這兩行在476行底下,還有修改487和486行


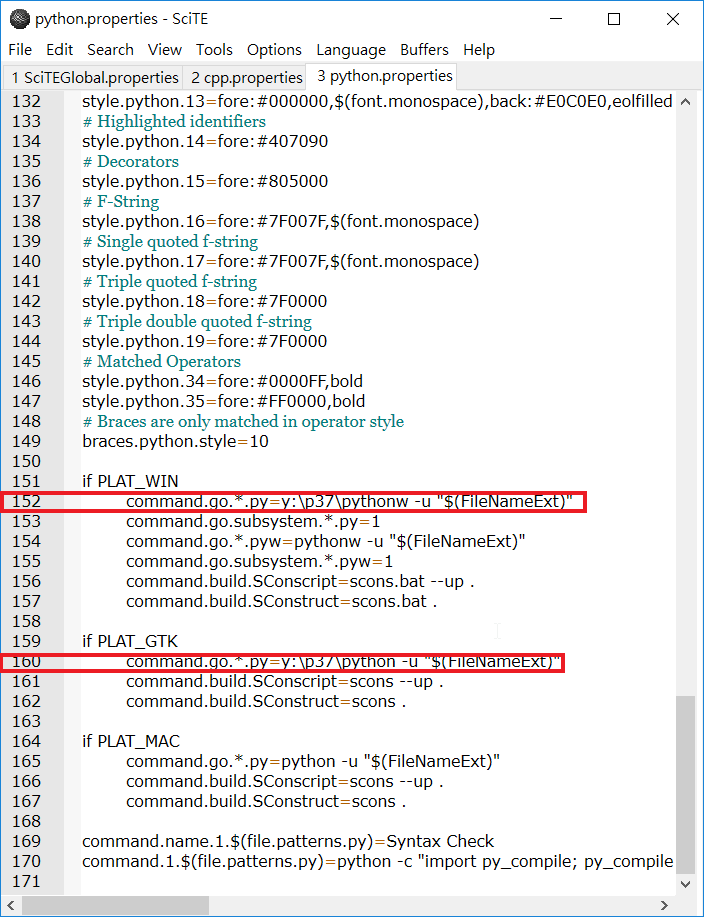
5.在資料夾中搜尋python,修改152行和160行

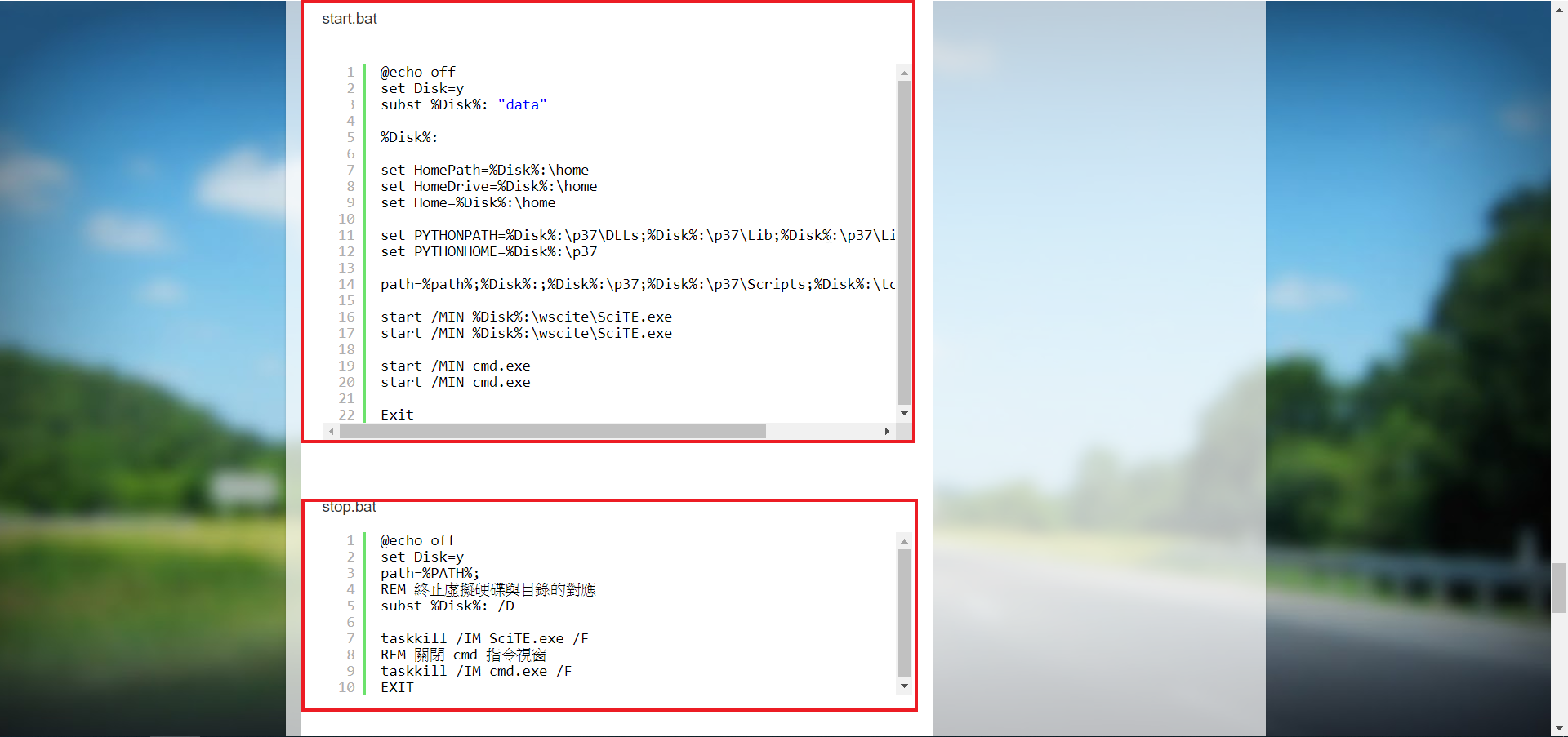
6.在scite中建立兩個新的檔案,其中一個存為start.bat,另一個存為stop.bat
7.可攜系統製作影片
Week5:
和組員一起討論如何利用V-rep讓手足球機構可以正常運作、並討論如何讓足球員偵測到碰撞、還有討論了關於偵測進門的時候該有什麼反應。
Week6:
和組員工共同完成BubbleRob tutorial的模擬,也終於對V-rep更加的熟悉,不過還是需要更加努力,因為還有更多需要學習的地方。
BubbleRob 操作影片
Week7:
因為連假的的關係,所以這周並沒有做太多的事情,大概就是放假前和組員討論關於分配工作的問題,本來是每個人的心得都交給一個人負責推送,其他人負責忙其他東西,像是V-rep模擬、Kungit手冊還有onshape繪圖,但是老師上課說必須要每個人都有commit資料,所以我們就改成大家推送自己的每週進度和心得,不過會遇到的問題就是可能產生衝突,所以在這部分也和大家討論好處理方式了。
Week8:
這週開始做實習任務三,可是下課前遇到一個問題,還是沒有解決,下禮拜會再嘗試解決。
1.一開始先在onshape將圖繪製出來
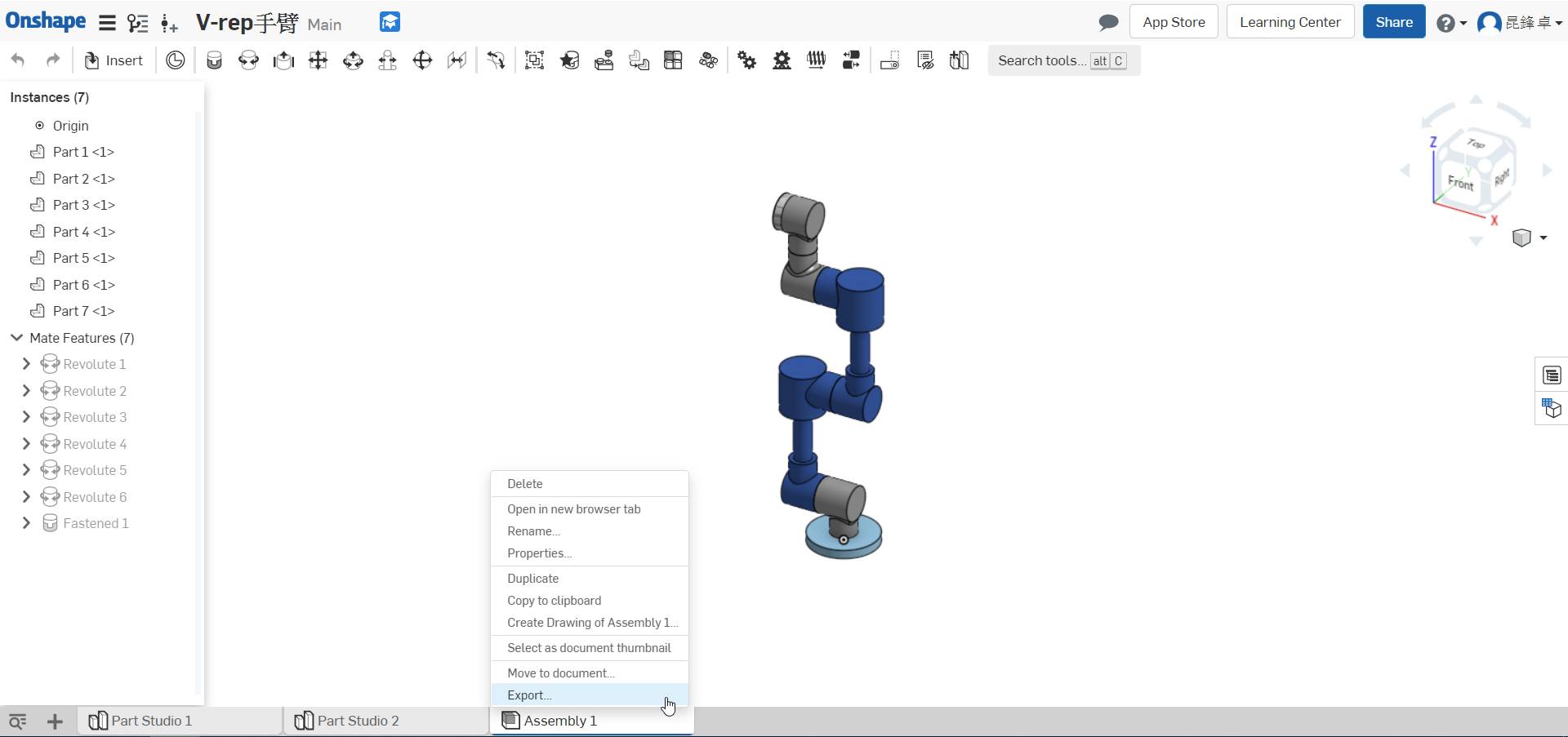
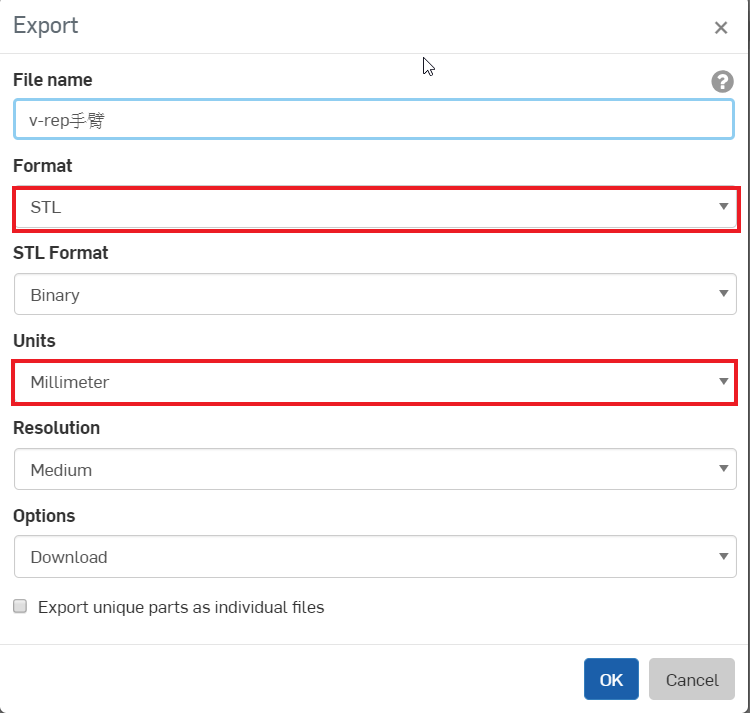
之後要進行轉檔,需要將檔案轉成stl檔。
這裡要將檔案選stl檔,並且將尺寸改為mm。
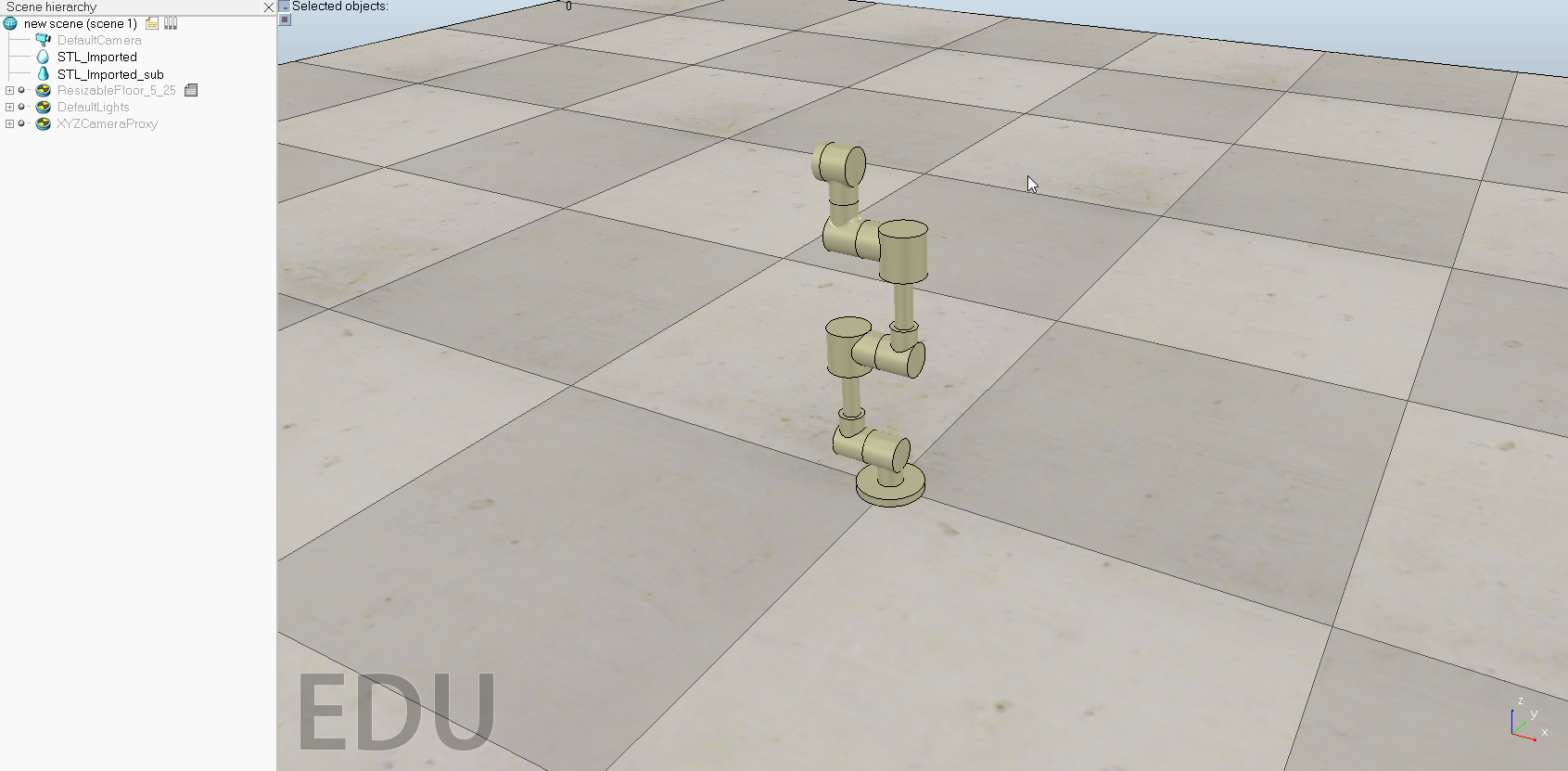
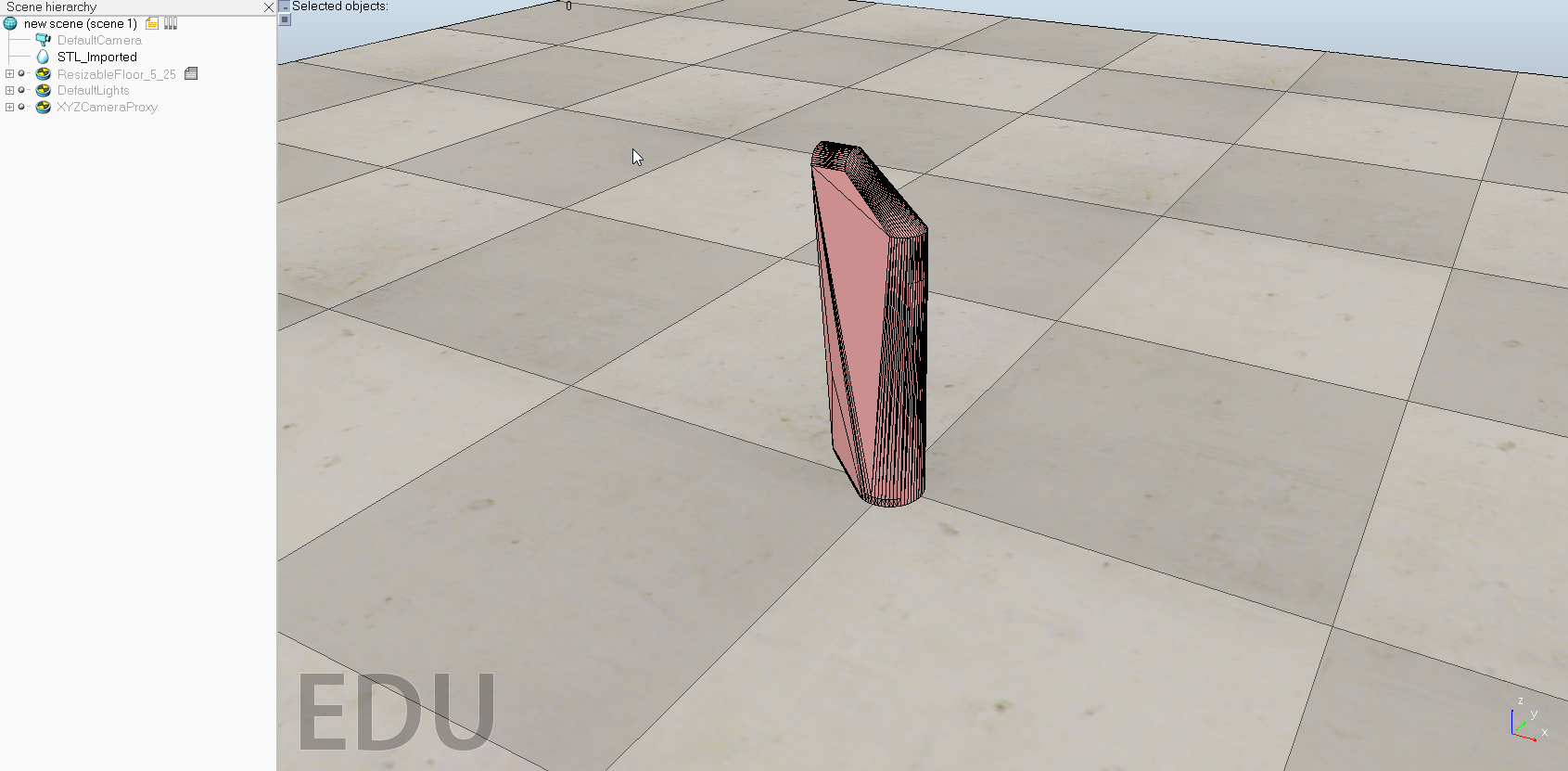
2.把轉好的stl檔拉進去v-rep做修改。拉進去之後為下圖
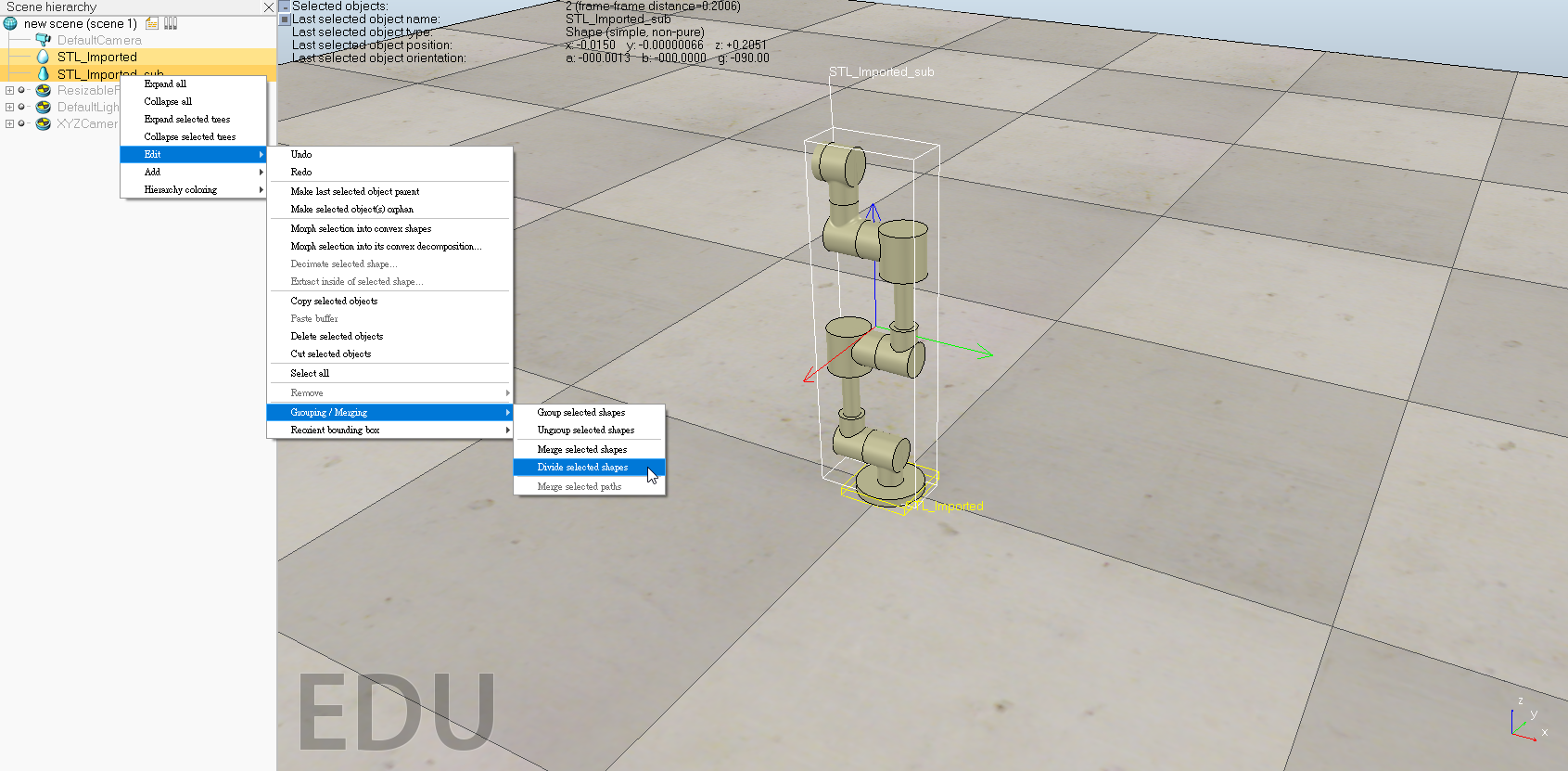
將左邊兩個檔案一起選起來後,按右鍵Menu bar --> Edit --> Grouping/Merging --> Divide selected shapes
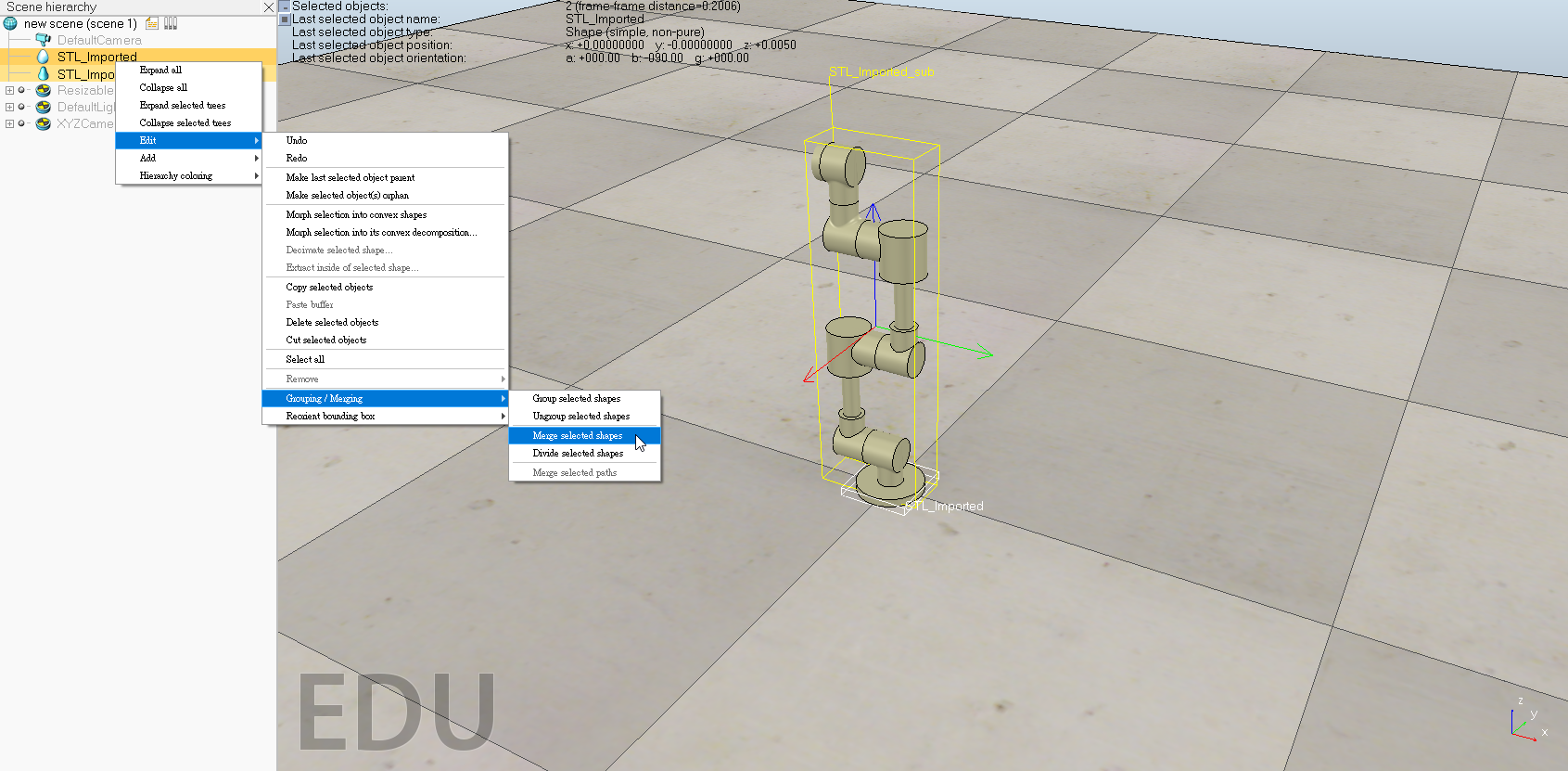
還是一樣將左邊兩個選起來後,按右鍵Menu bar --> Edit -> Grouping/Merging --> Merge selected shapes
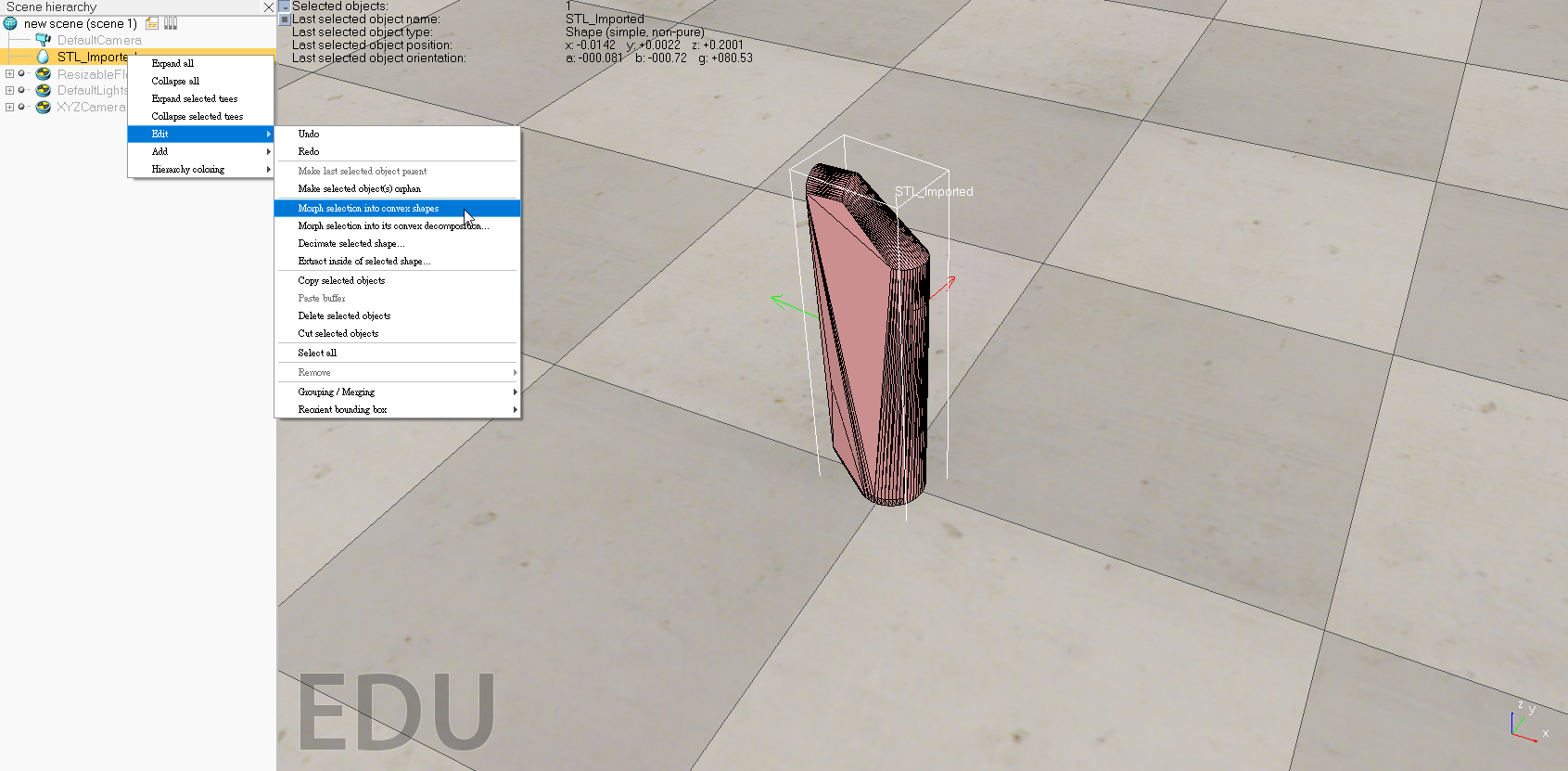
當上述兩個步驟完成後,兩個檔案會合併成一個檔案,之後對檔案右鍵Menu bar --> Edit --> Morph selection into convex shapes
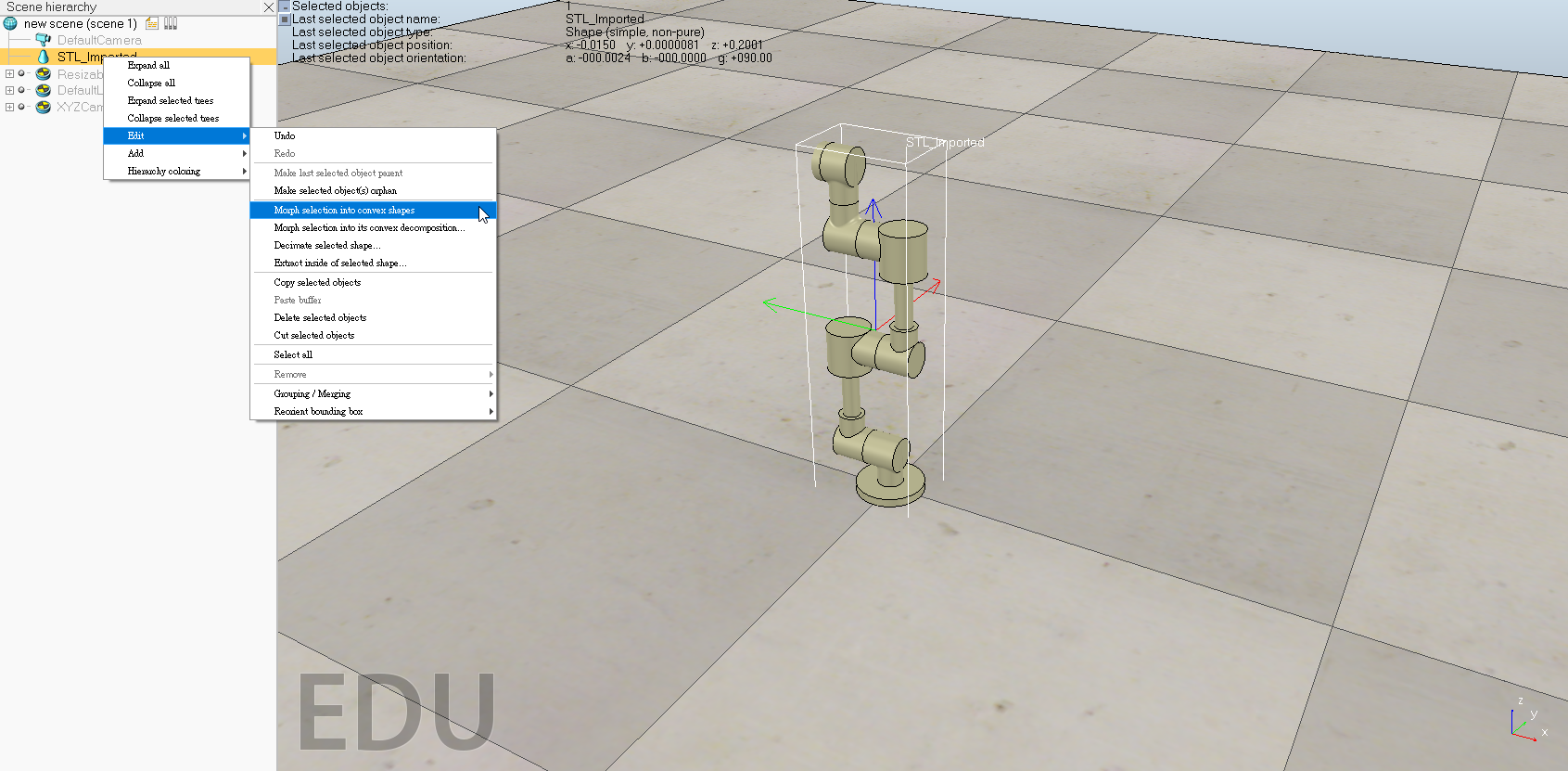
結果如下
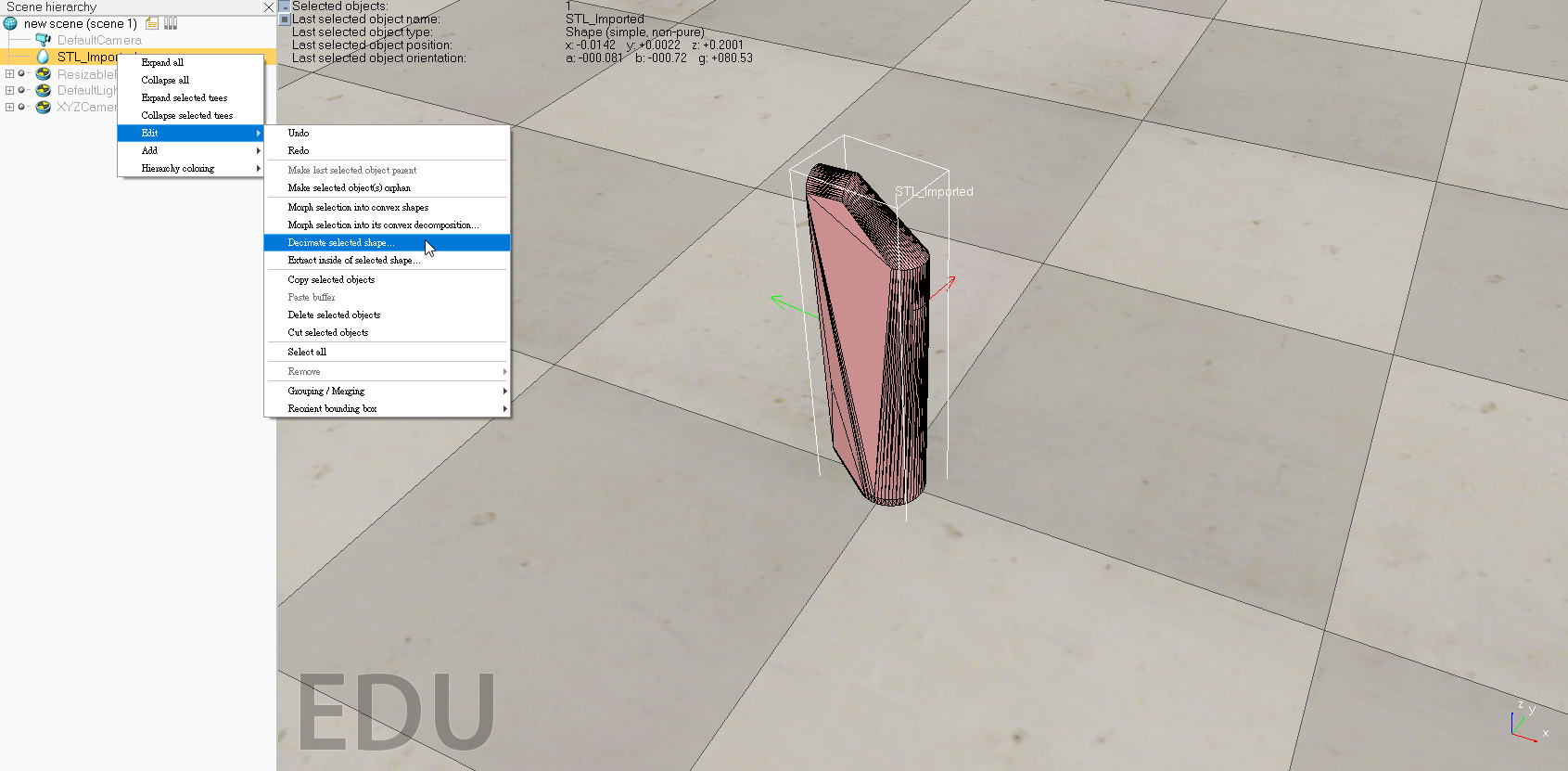
再來再對這個檔案右鍵Menu bar --> Edit --> Decimate selected shape
再右鍵一次Menu bar --> Edit --> Extract inside of selected shape
正常來說會變成
可是不知道為甚麼會變成這樣,所以還需要再和組員討論看看是哪邊的問題。
Week10:
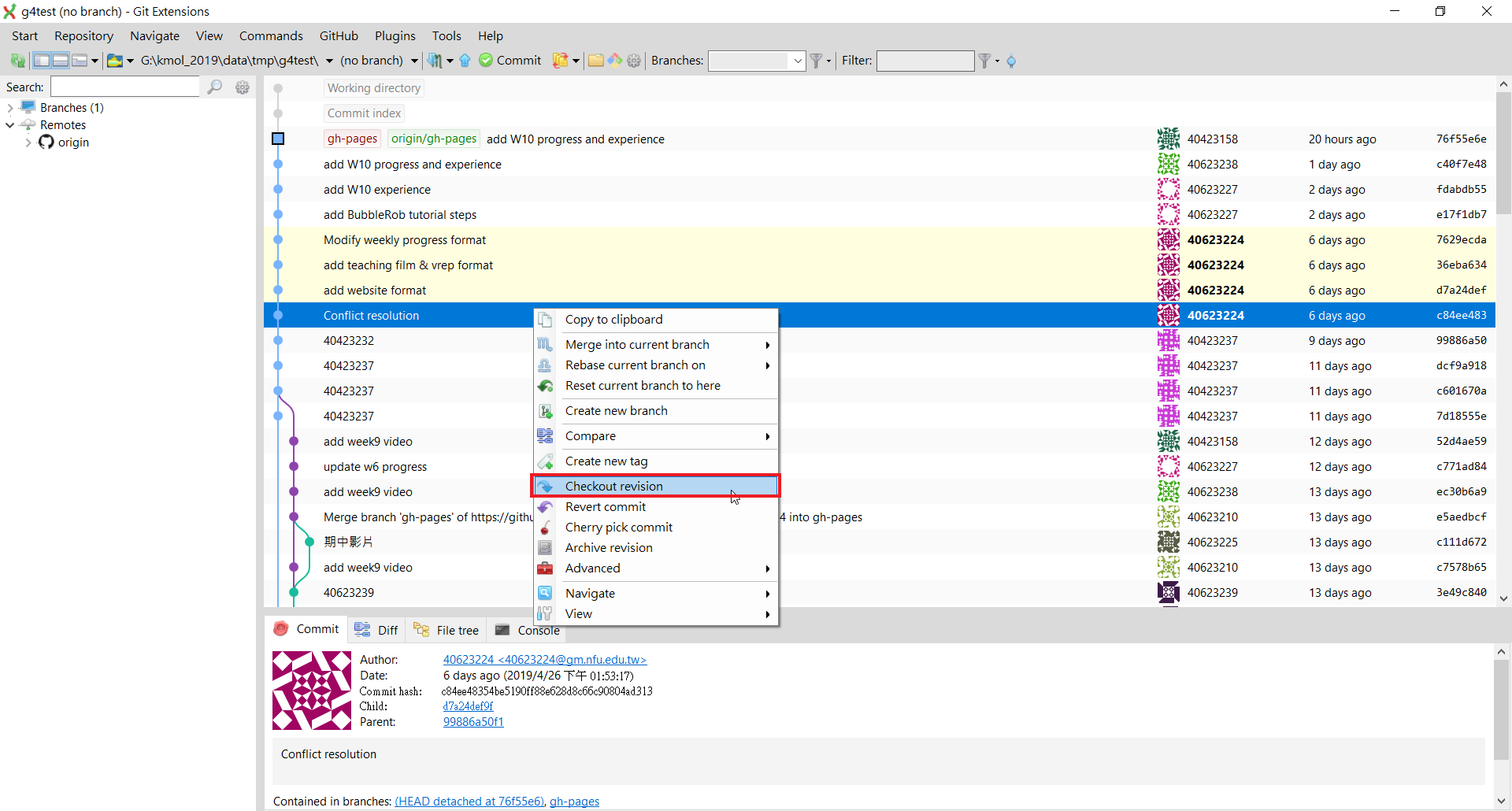
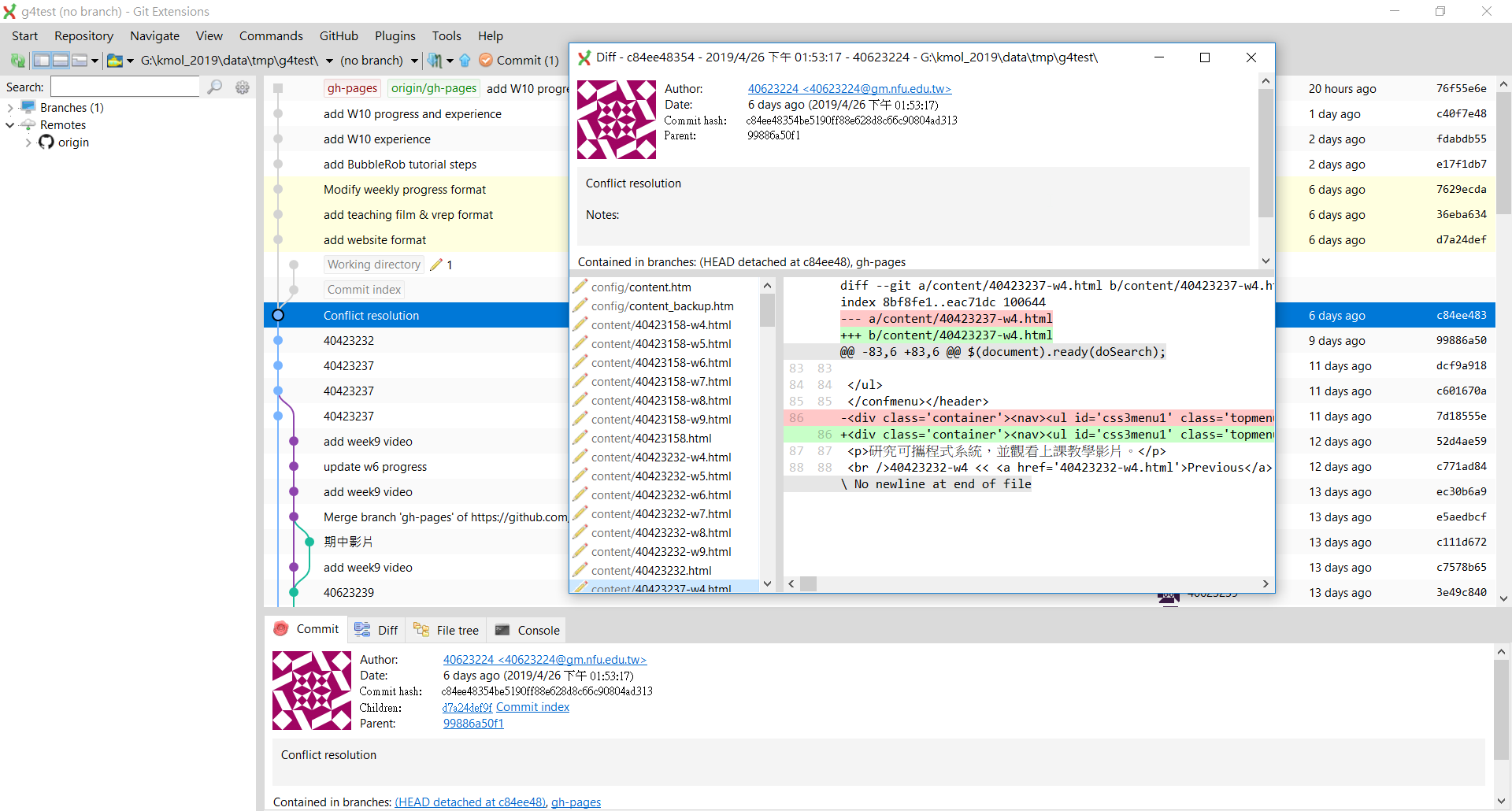
如何利用GitExtensions進行各版次內容的checkout
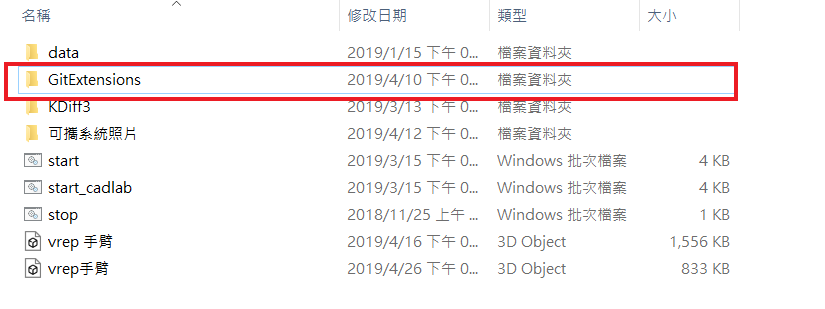
1.先在mde.tw的網際內容管理裡面找到GitExtensions的標籤,之後對GitExtensions.7z進行安裝,並且加壓縮在自己的隨身碟裡。

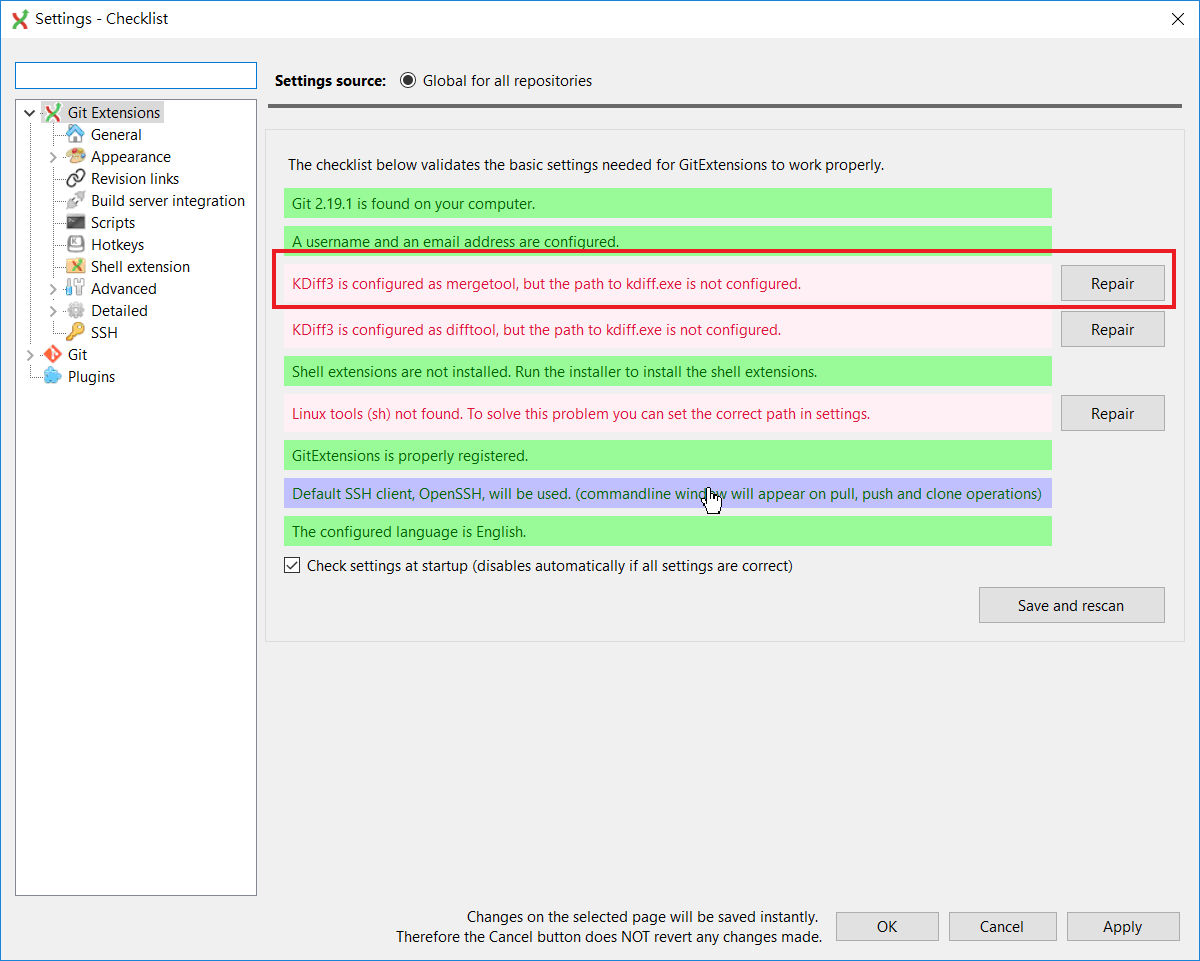
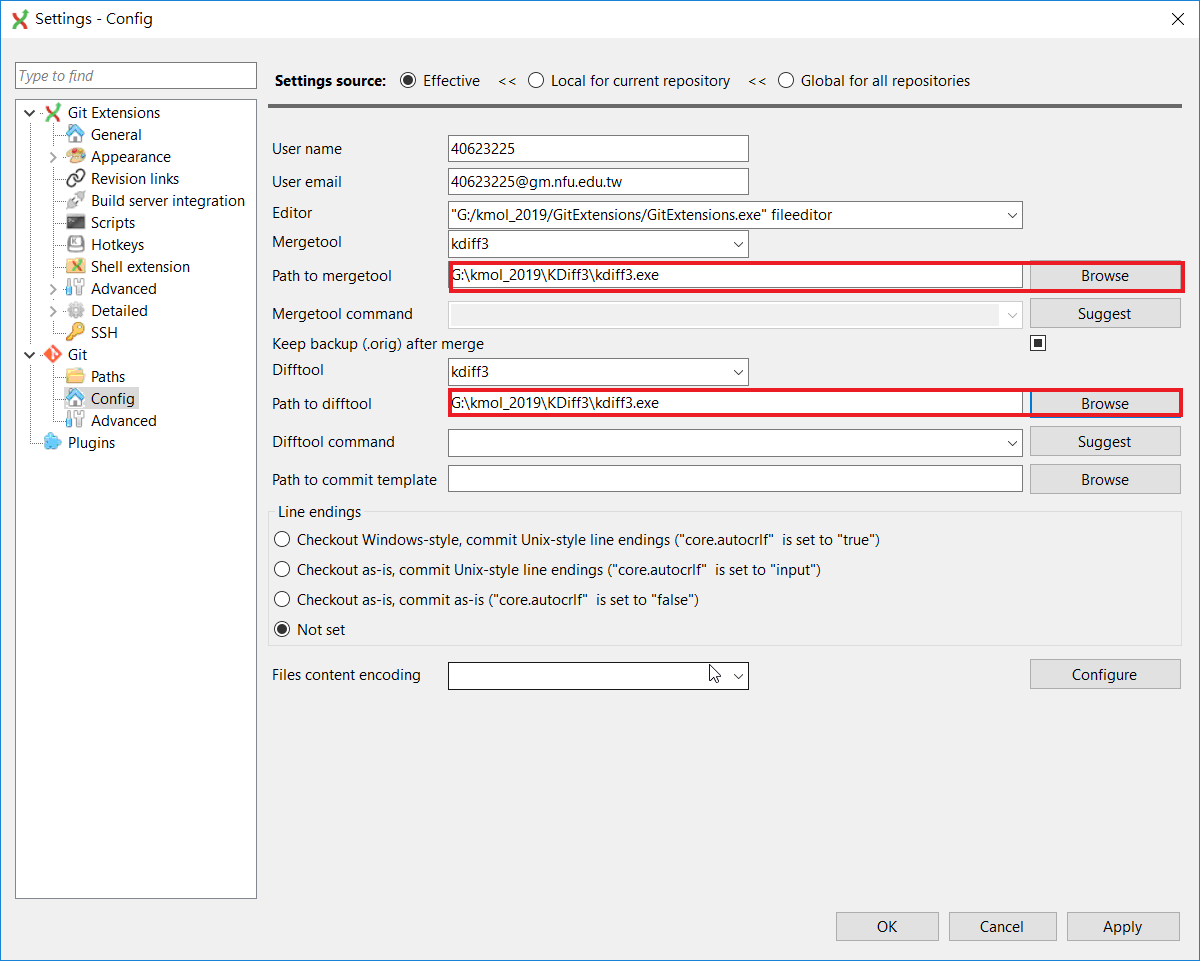
2.之後打開GitExtensions,因為會用到Kdiff3,所以需要給Kdiff3路徑,從資料夾找到Kdiff3.exe檔案。
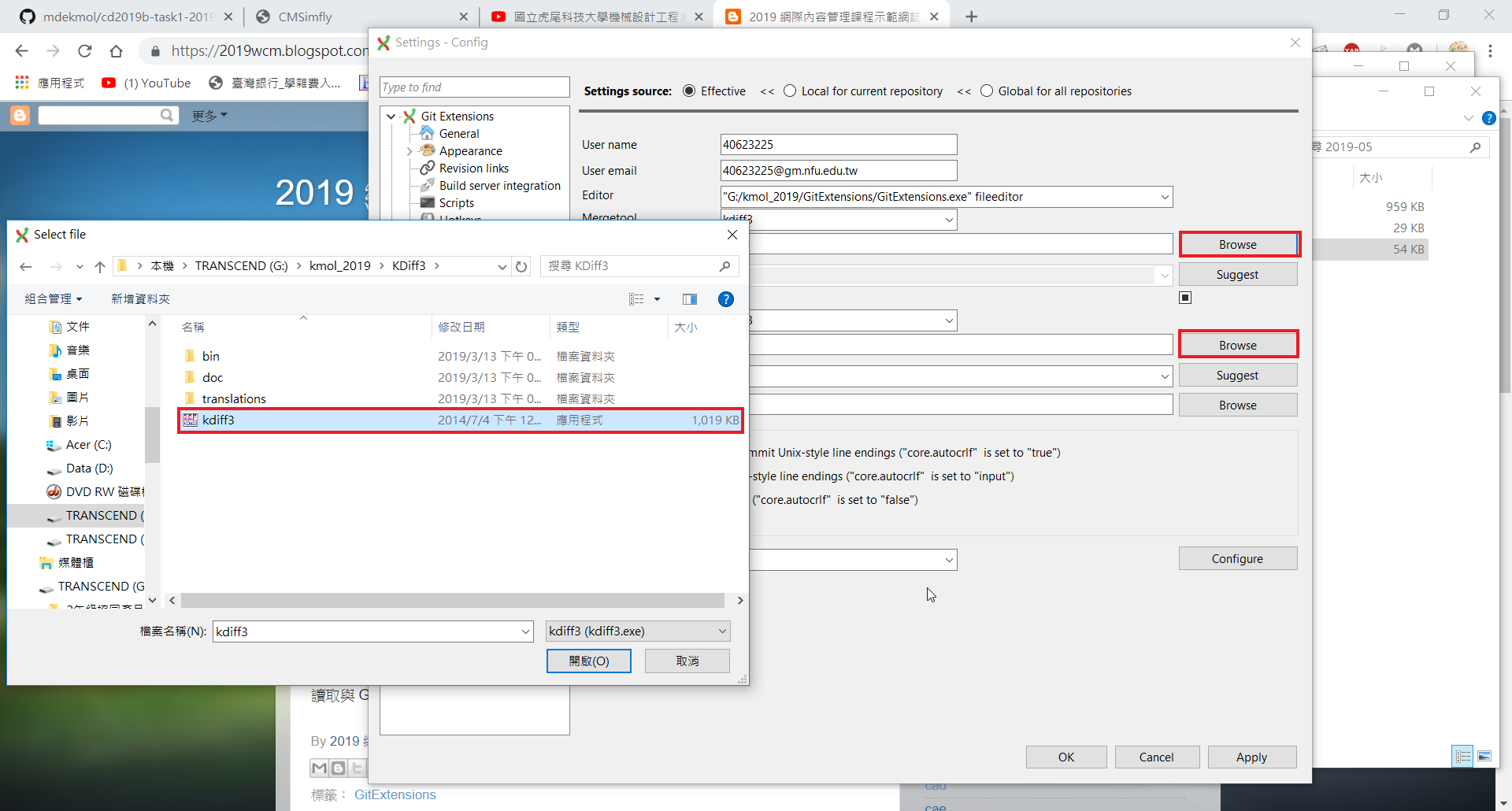
選取Kdiff3檔案後,完成如下。
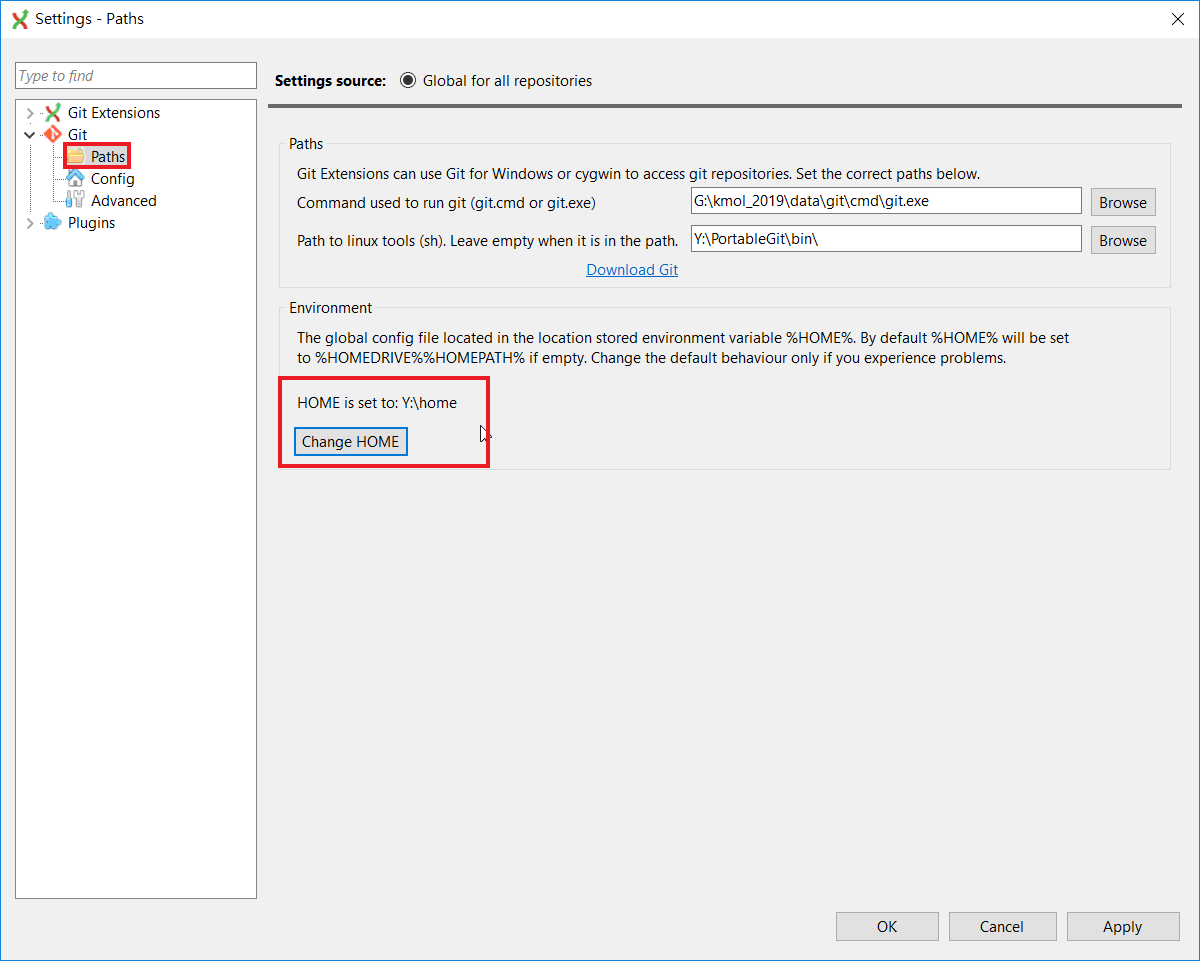
3.之後還需要對Git的路徑(Paths)做更改,需改成在Y底下的HOME,改好之後要按儲存。
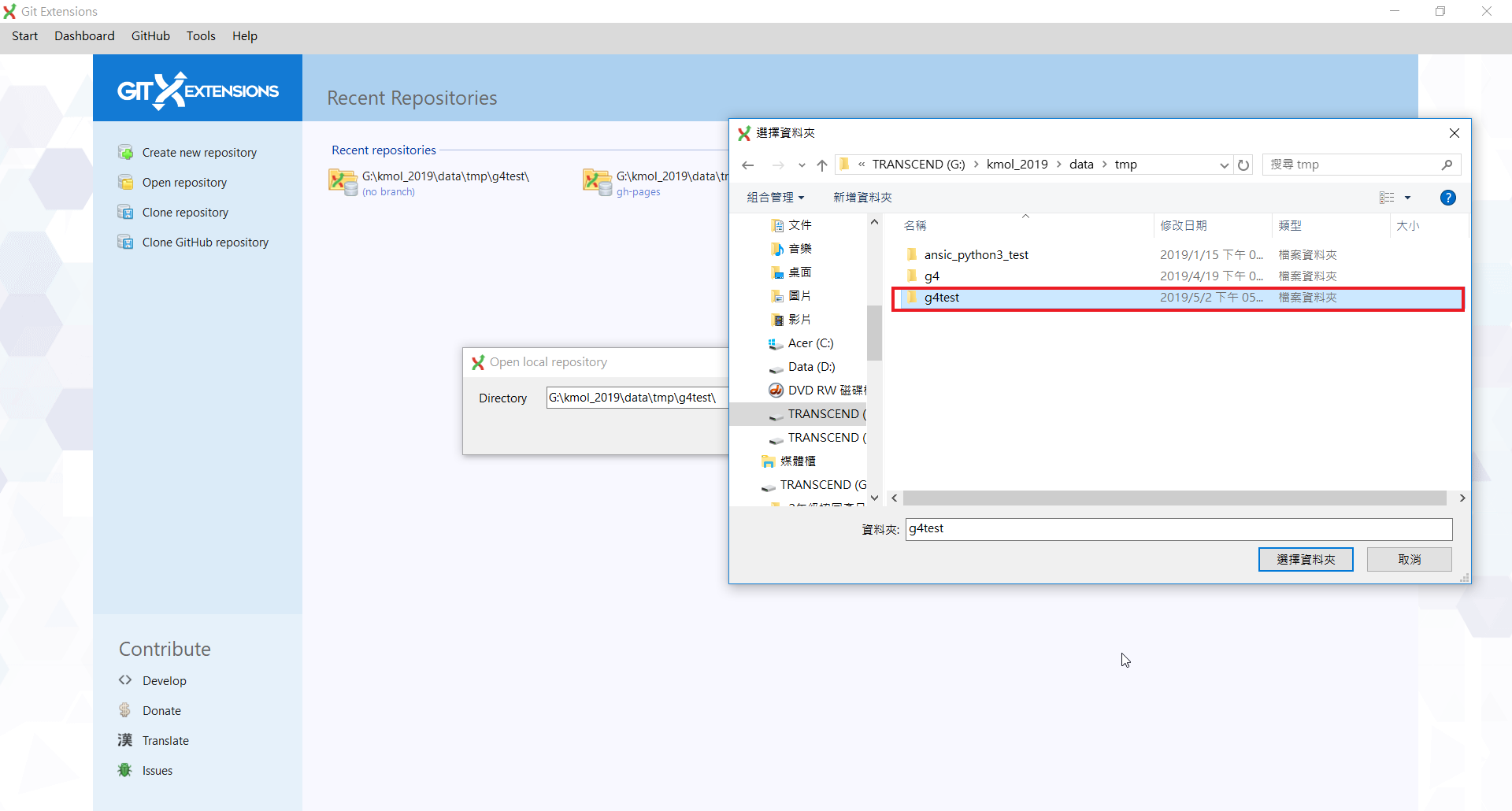
4.以上步驟都改好之後,就可以開始改需要的檔案,而我這邊是利用第4組的倉儲做更改。
5.記得在回到以前的版次時,將Commit的資料做Reset,Reset完之後就可以右鍵對想要看的版次Checkout Revision。
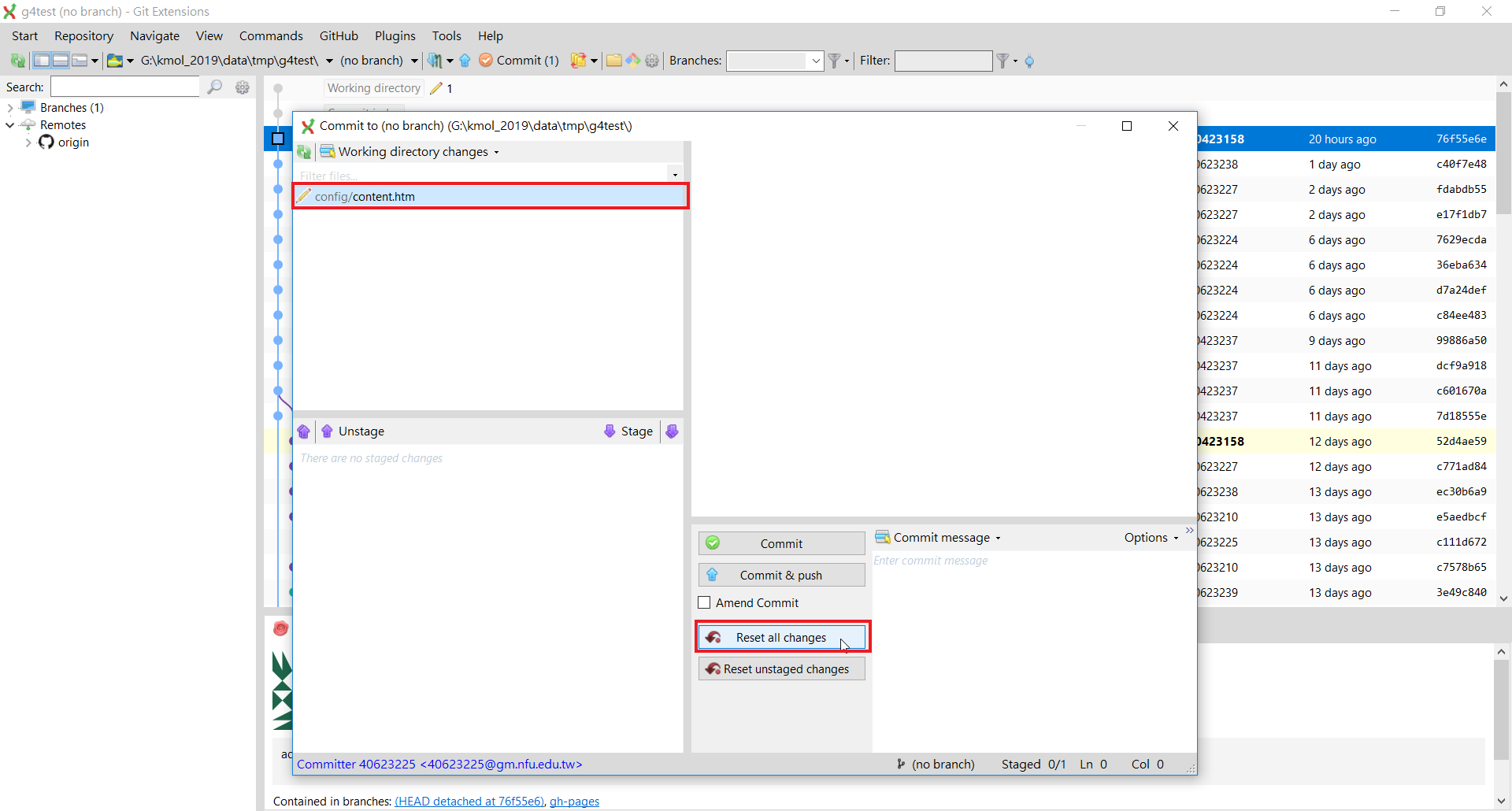
6.對檔案點兩下即可觀看當下版次所推送的所有資料。
Week11:
這週和組員共同製作v-rep手足球,目前足球員可以手動操作,和可以操作桿子左右移動而且不會超出框外,因為有個固定點,雖然現在不會超出,可是下方的距離還是會一直增加,這點需要和組員再多多討論,下週開始會試著讓球員自動偵測並且踢球。
Week12:
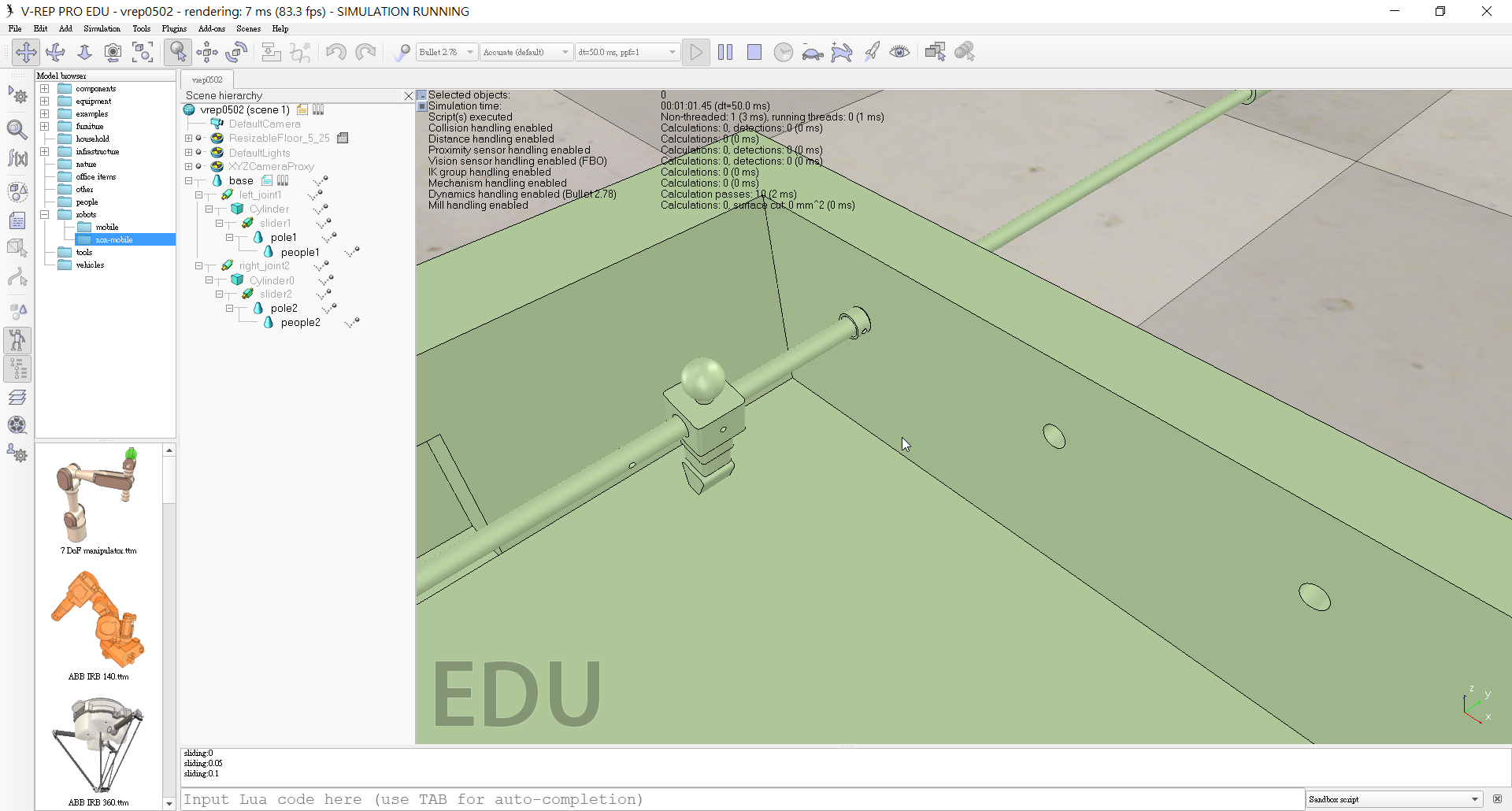
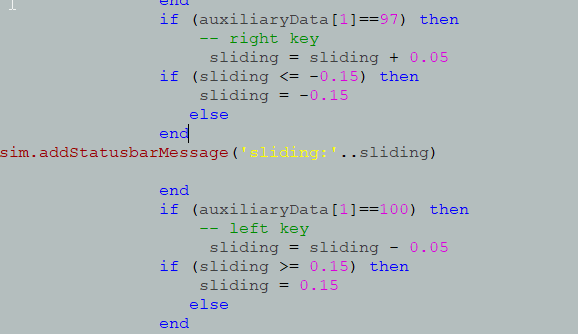
如何限制手足球桿子的移動距離
打開每一根桿子的程式碼,將下列程式碼輸入進去
if (sliding <= -0.15) then (限制右邊的移動距離只要小於或等於-0.15)
sliding = -0.15 (移動值就只能等於-0.15,不會在小了)
else
if (sliding >= 0.15) then (限制左邊的移動距離只要大於或等於0.15)
sliding = 0.15 (移動值就只能等於0.15,不會在大了)
else
Week13:
這週和組員一起討論自動擊球的程式,目前已經將自動擊球的程式完成,也可以正常操作手動對自動,這週還有討論送球機構該如何繪製,最後討論出來後,我們打算利用螺旋的方式進行送球。
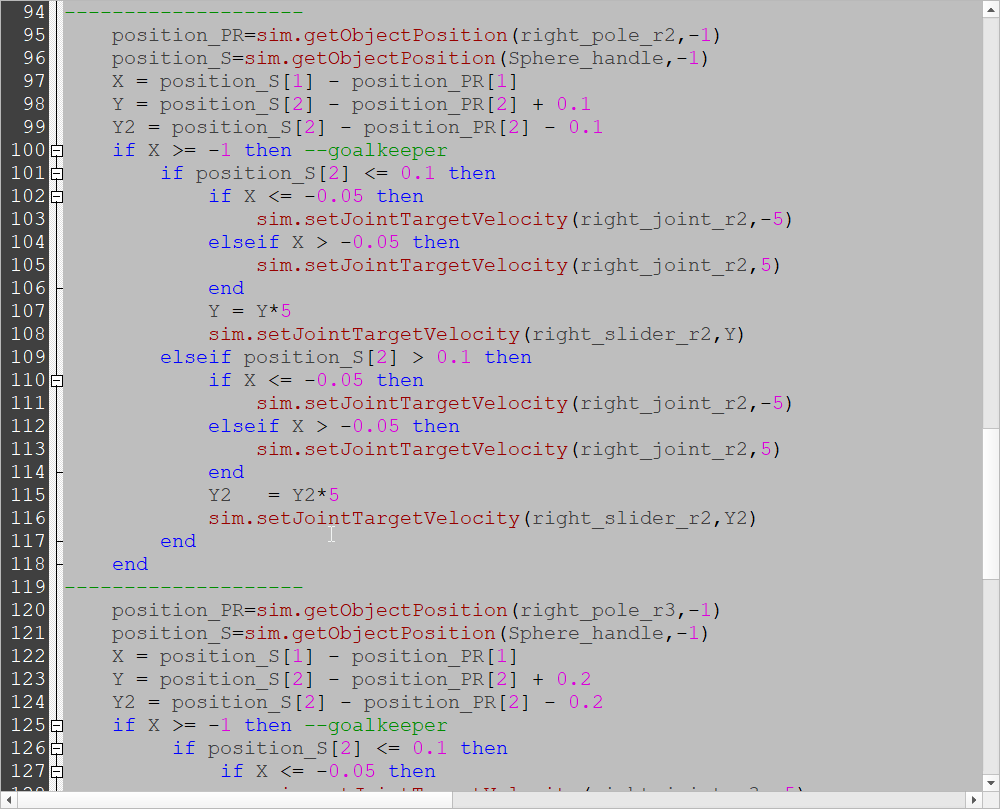
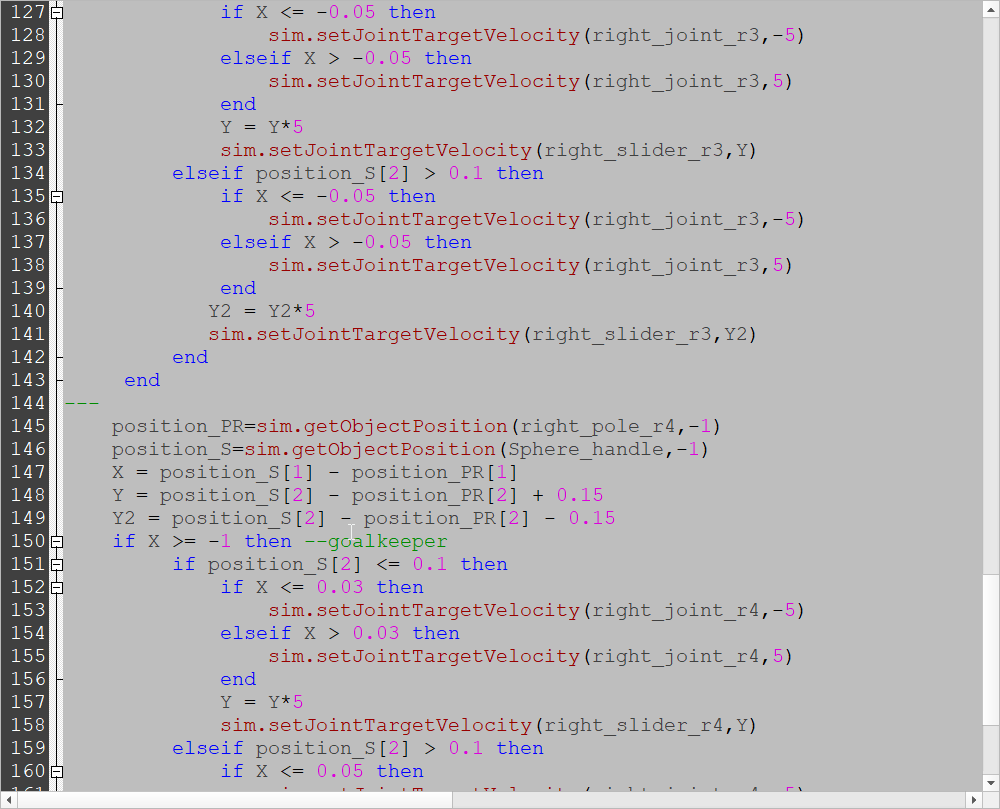
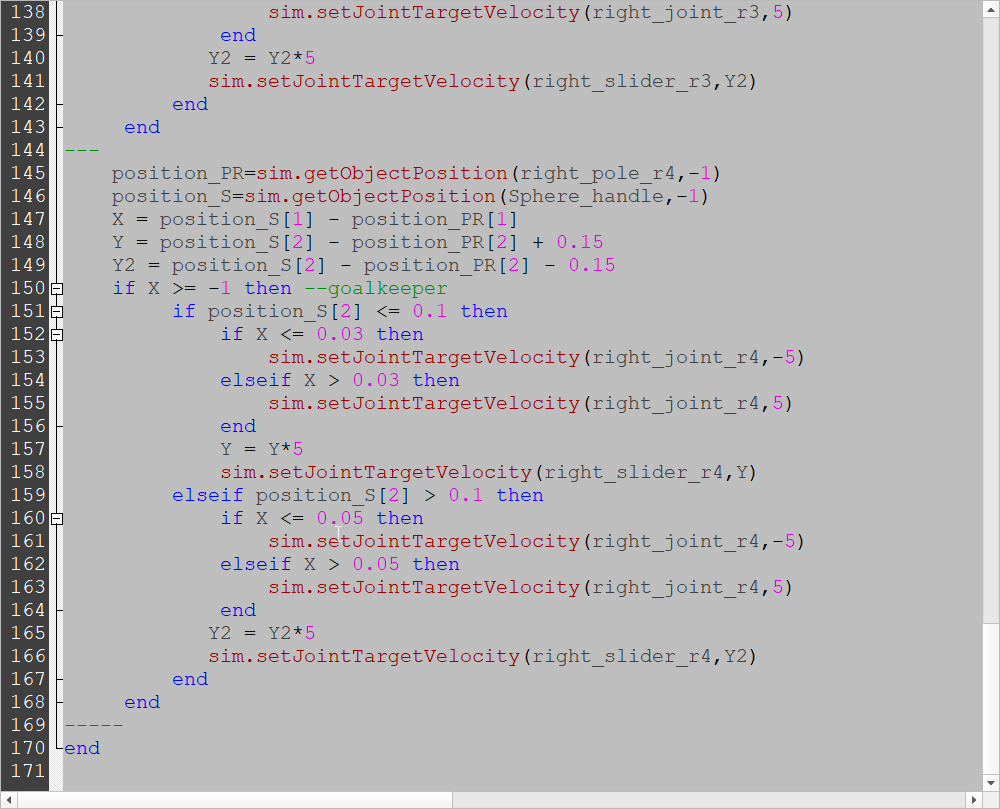
Week14:
在上禮拜已經將其中一邊的程式寫出來了,也可以正常的運作,這周就將另外一邊設置完成,可是並沒有如期完成,反而又沿生出了一些問題,像是球員的偵測距離不正確,踢球的角度也不對,下周將會和組員一起討論,這週用的檔案是比較舊版本的,所以送球機構不是新版的。
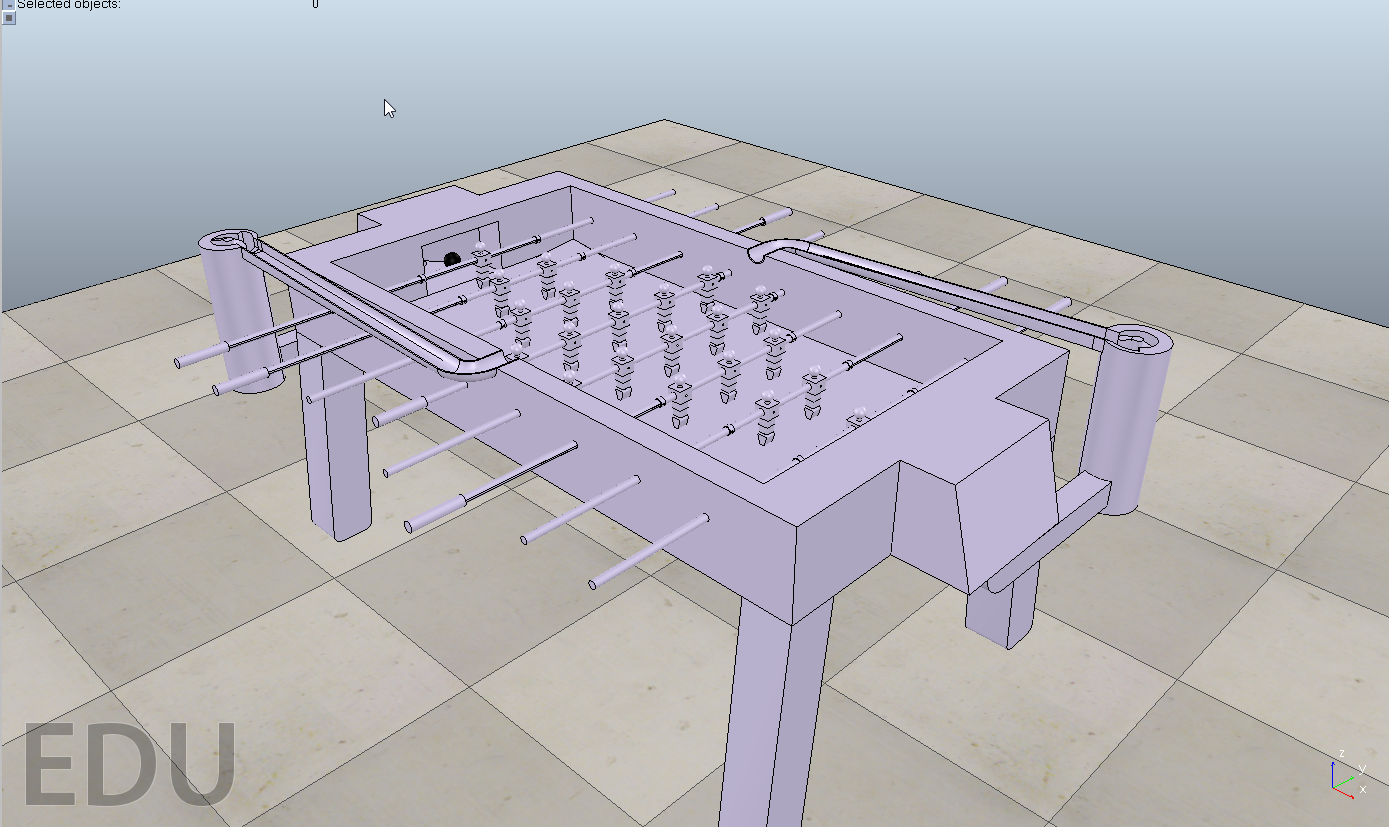
Week15:
這週和組員討論完後,已經共同的將自動對自動的模擬完成了,所有的球員都可偵測到求並且踢球,不過左邊的只能向前踢,右邊的也只能向前踢,兩邊都沒辦法往自己的後面踢球,送球機構也已經完成了,大致上基本都已經完成,不過我們每人再分配一個部分,試著將手足球模擬的更好,而我是分配到手動對手動的部分。
機器對機器模擬影片
Week16:
這週開始將分配到的工作-手足球手動對手動變得更好,送球機構也已經加進去了,程式變得更簡單明瞭,也加了攝影機讓操作者更清楚的看到目前球的位子,而這週是備考週,所以一邊準備十七週要的個人倉儲和期末影片,一邊將自己的網站和分組網站做修改。
下載連結:手足球手動對手動最後版本
手足球手動對手動最後版本模擬影片
Week17:
評分比例:
學員出席 (20%): 20
Github 倉儲管理 (20%): 15
Onshape 協同操作 (20%): 0
V-rep 模擬 (20%): 20
程式開發 (20%): 15
自評分數: 70
40623224-Week << Previous Next >> 40623226-Week