40623227-Week
Week4:
將自己組別的網誌git clone https://github.com/mdekmol/cd2019b-task1-2019cdb_t1_g4下來到自己的隨身碟,並在隨身碟中加裝kungit這項指令,使我們能在網頁上推送資料,也利用時間進行組內的分配工作。
Week5:
這週首先練習vrep(BubbleRob tutorial),雖然只完成車前進路線的部分,至於感測器的部分之後會再繼續練習。
Week6:
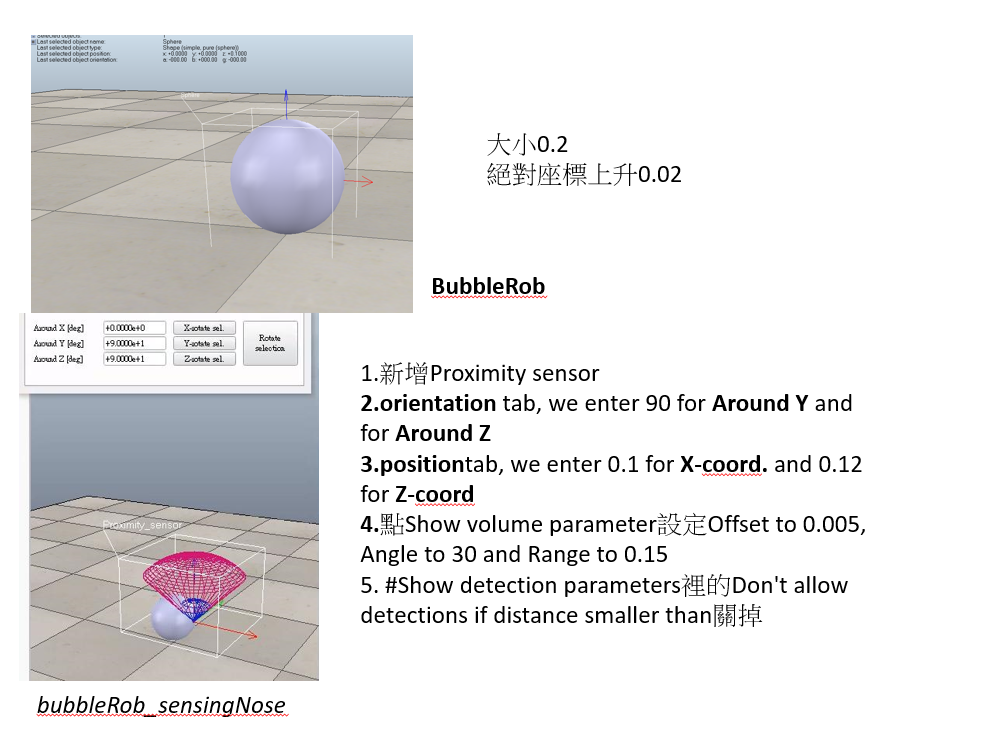
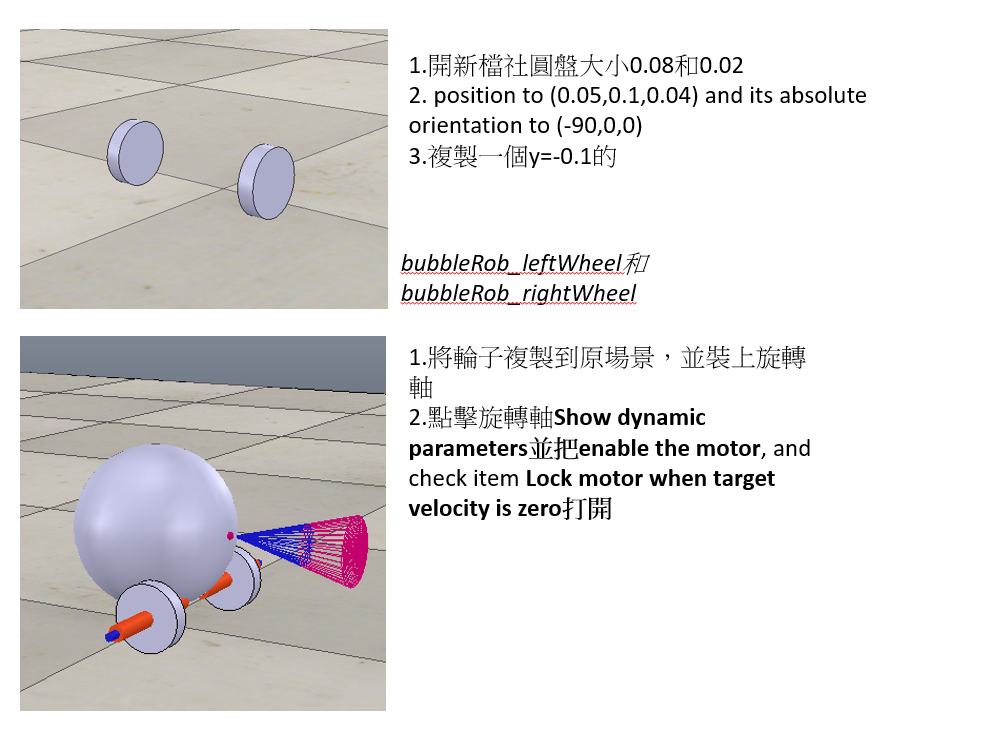
完成BubbleRob tutorial的全部模擬,對相應的單字還得多多加強。
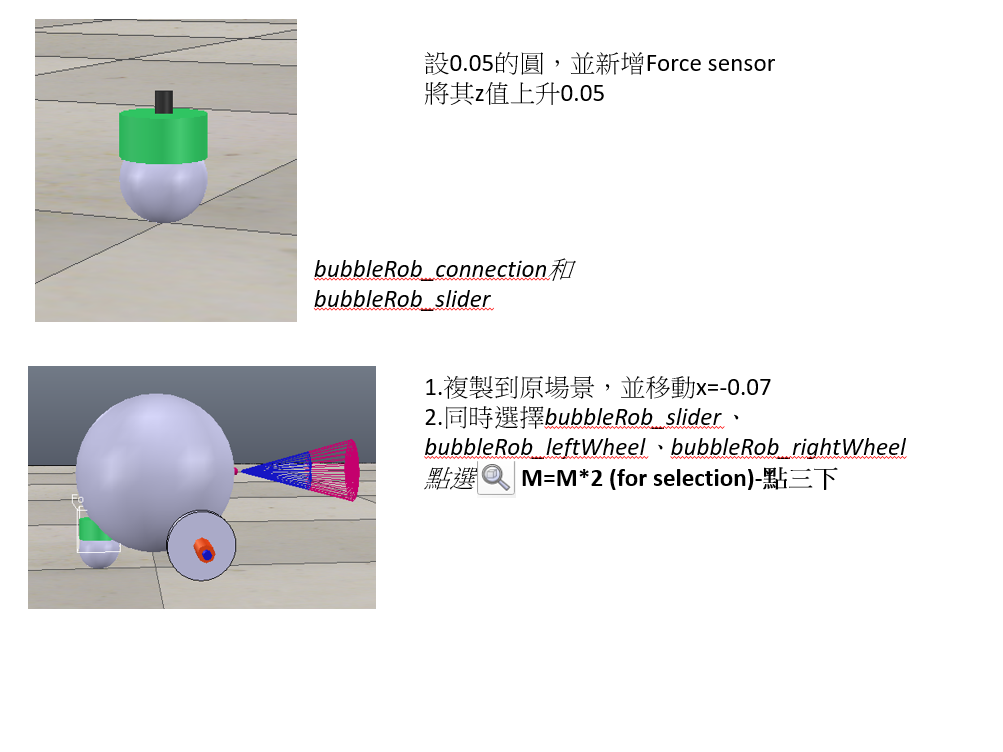
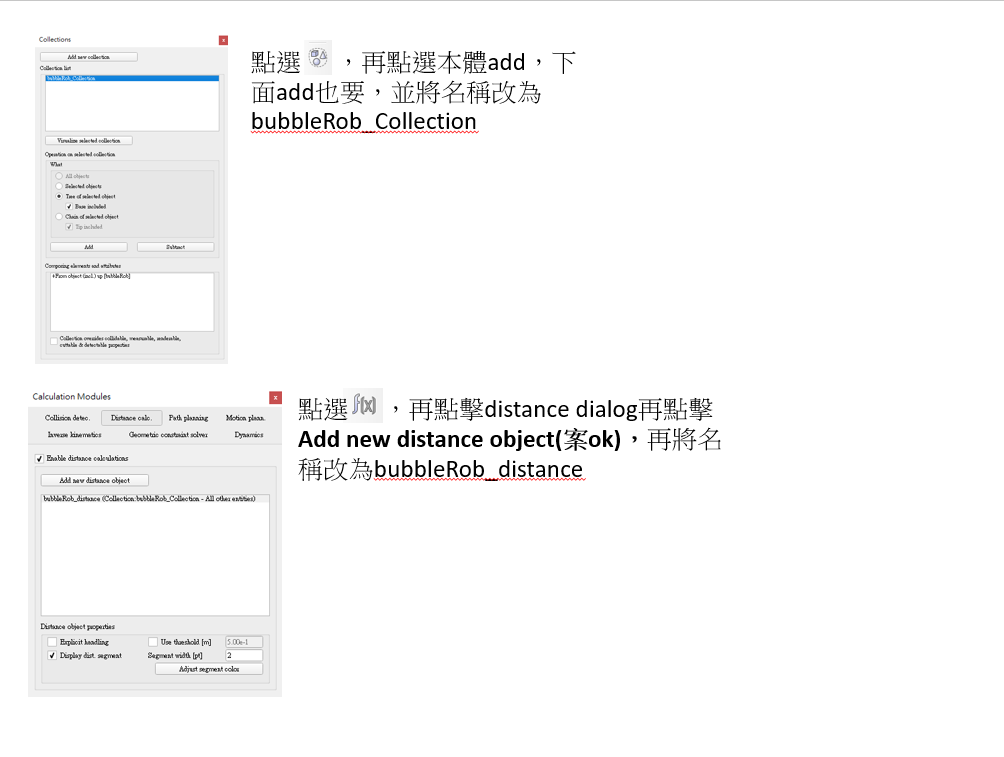
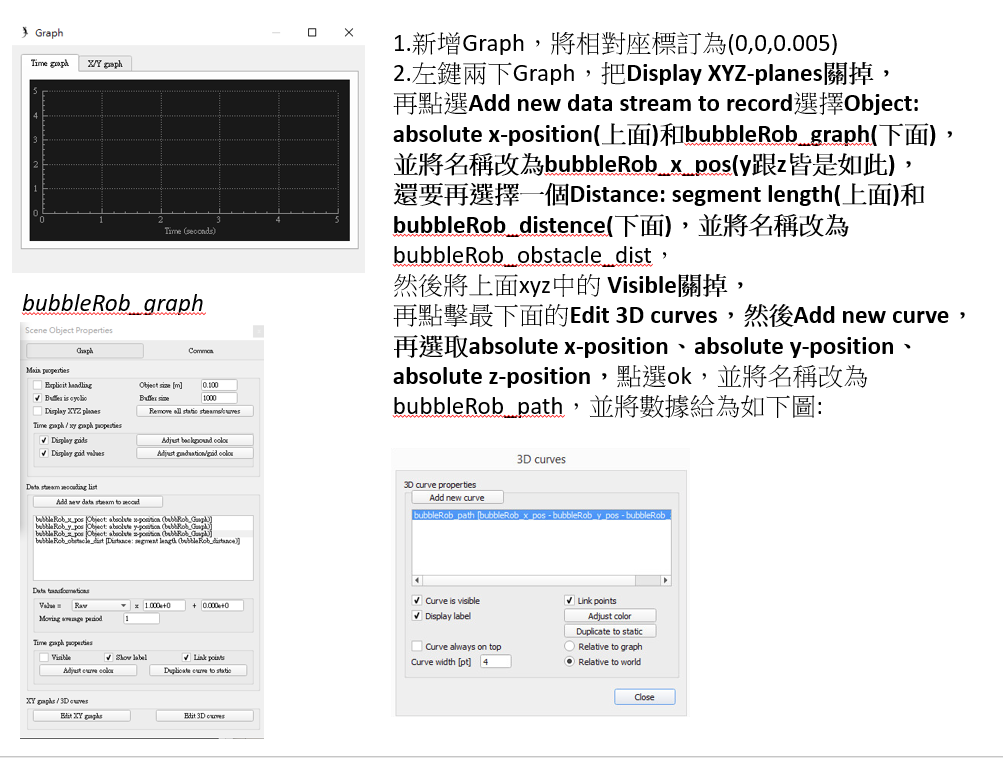
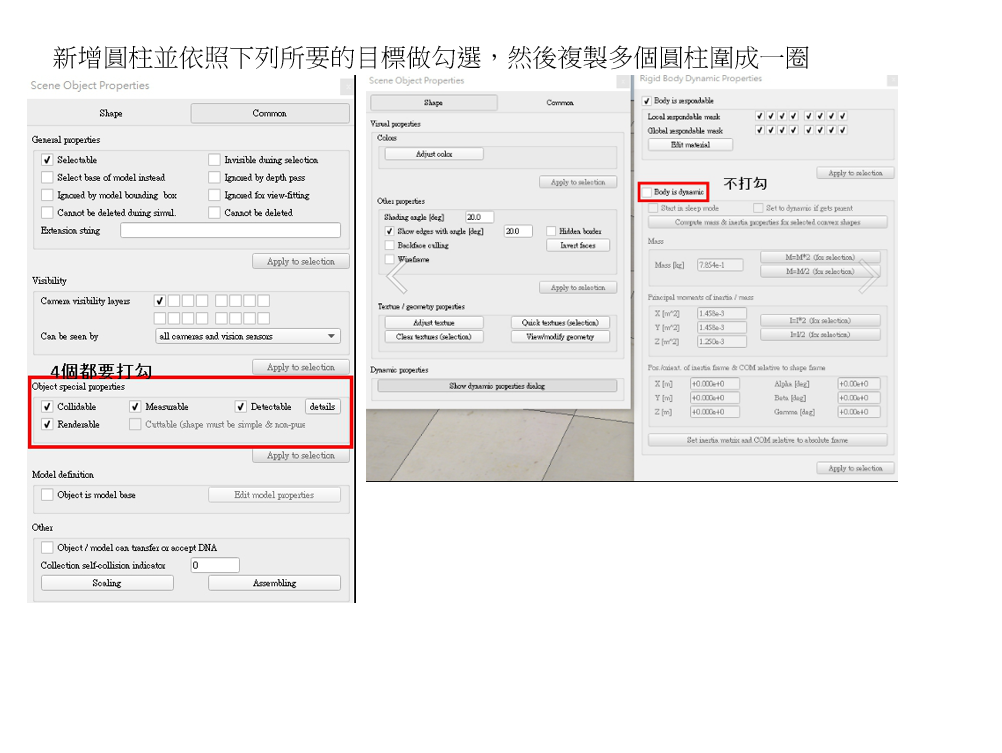
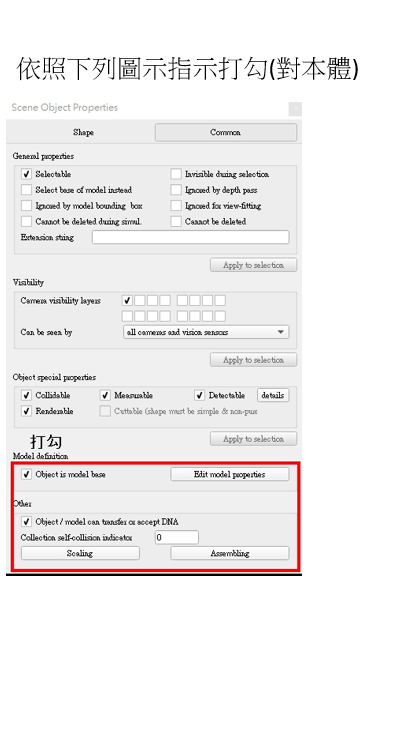
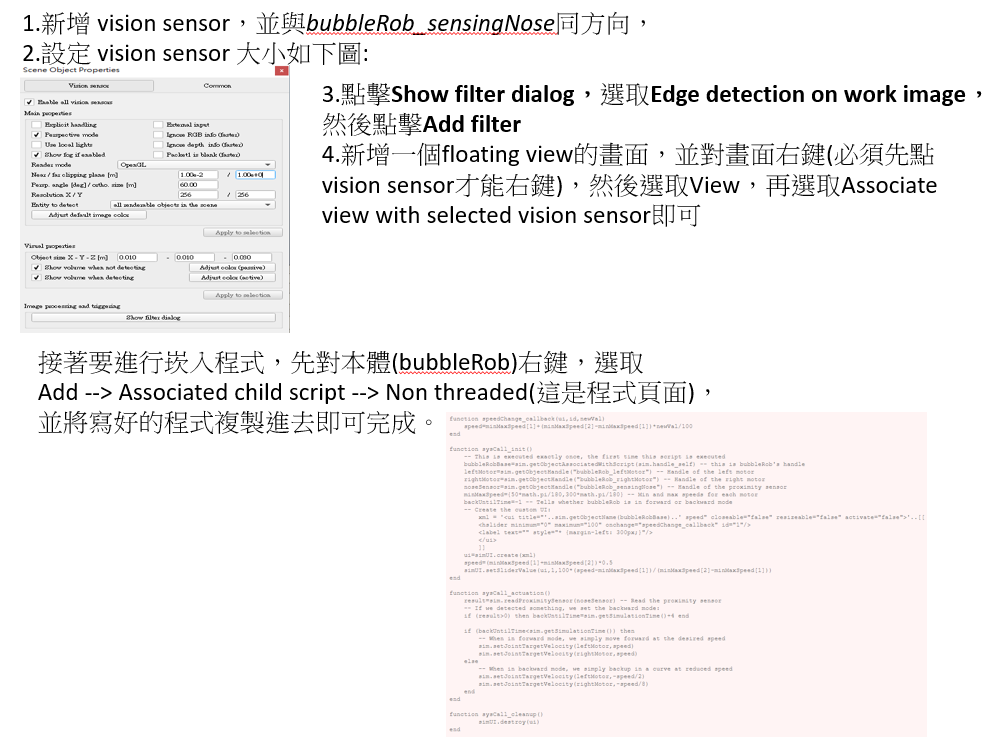
以下為 BubbleRob教程步驟(ppt檔)
Week8:
1.將手足球匯入VREP,並裝上旋轉軸,發現當初畫圖可能可能與人物約束住,導致無法將軸正確的安裝在圓桿上,因此還需要再改圖。
嘗試改為到桿子正中間
但還是無法很準確地定到位置,導致偏心轉。
2.把實習任務3完成1/3部分
利用Oshape大致繪出練習所要的模樣
轉入VREP初步完成這個樣子,還無法正確地轉成所要的手臂樣子
Week10:
之前的手足球再轉入VREP製作時,都發生許多問題,上面例子中的約束問題是其中一件,雖然有解決,可是後續還是處理不了,因此與組員(40623238)討論問題所在,他針對畫圖做修改,我是則嘗試解決所遇到問題,之後雖然解決一個孔徑大小問題,但後續也發現在把手部分也有問題,導致在vrep裡的Revolute旋轉軸無法對準正中心,後來才發現是當初運用三點定弧而導致,並且去坐進一步的修改。
以下為修改完的檔案模樣:
Week11:
完成人與人的對打,對個別的物件進行設定,目前球的路徑無法預測,還在尋找解方案,下週與組員繼續研究。
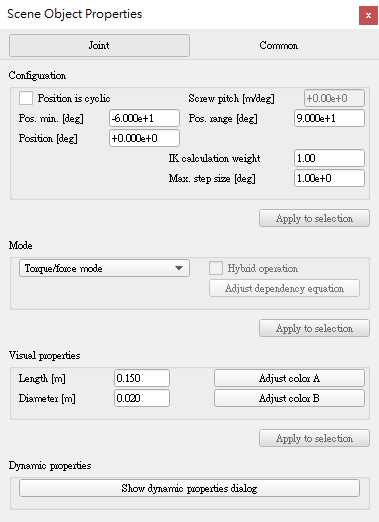
旋轉軸的設定
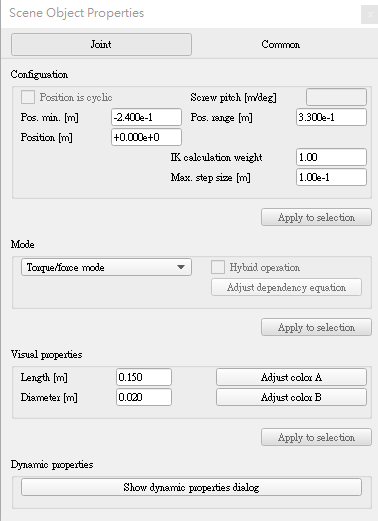
滑動軸設定
Week12:
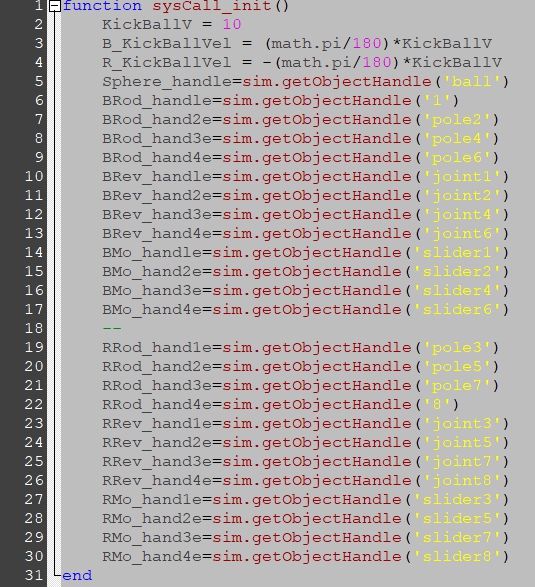
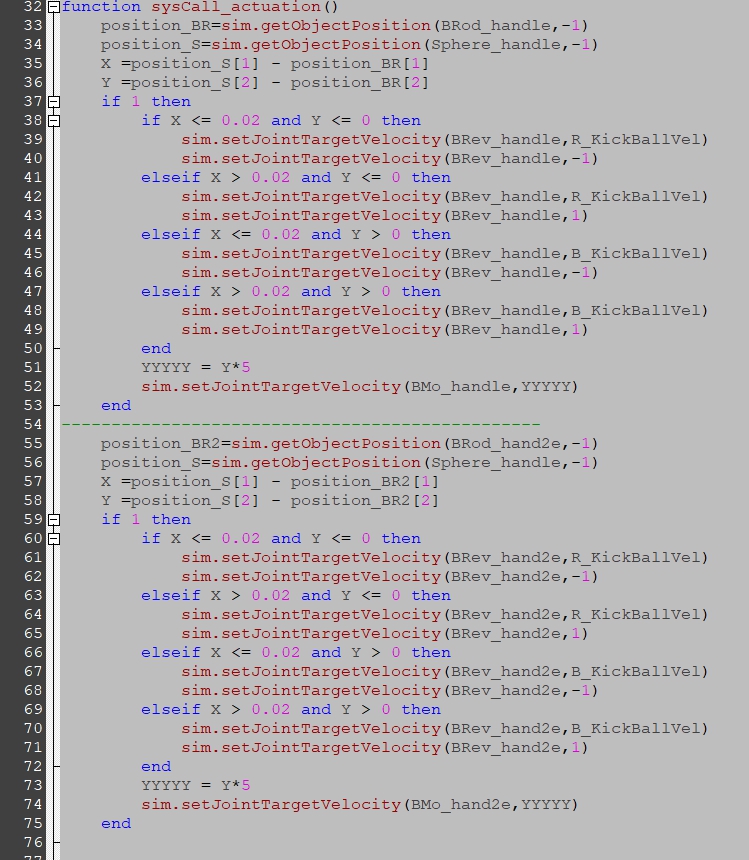
將最終的人與人手足球對打完成,這裡我是將每根軸去做個別的程式書寫。
Week13:
目前完成電腦控制守門員對打,原本想完成整體的部分,但在製作過程發現對於程式的不熟悉而停止住,以及目前對於人的角度設定還有些問題部分,因此先做到這,日後再與組員進一步討論。
Week14:
完成部分的機器人對手動控制的手足球模擬,下周將要將球員補上去,並要再更改人的參數值(角度.移動距離)。
Week15:
剛開始因為沒給定縫隙,導致球只能在底部一直旋轉
最後完成模樣
Week16:
因為對程式的不熟悉,因此參考別班守門員對打程式部分,並在當中將程式修改,並完成機器對機器的全部對打,但當中在人踢球的角度還有移動路徑並不是弄得很好,如果有時間將會進行修改。
Week17:
期末自評成績
學員出席 (20%): 20
Github 倉儲管理 (20%): 10
Onshape 協同操作 (20%): 5
V-rep 模擬 (20%): 20
程式開發 (20%): 10
自評分數: 65
40623226-Week << Previous Next >> 40623234-Week